Overview
This page shows what JRoboOp can do.
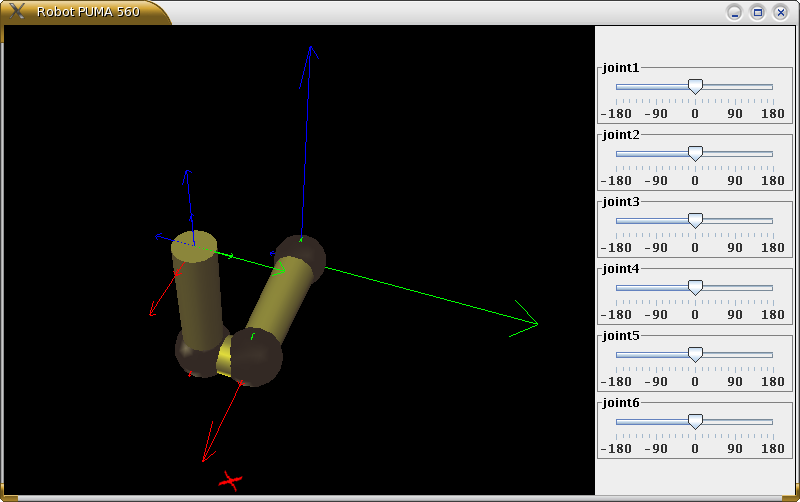
- Kinematics and Dynamics of robot PUMA 560. The robot is
a 6-dof manipulator with spherical wrist.
- Java3D model of robot PUMA 560. A very simple 3D model
is generated from DH table, the 3D model shows
the frames of joints from 0 to 6 too.
- Matrix functions example.
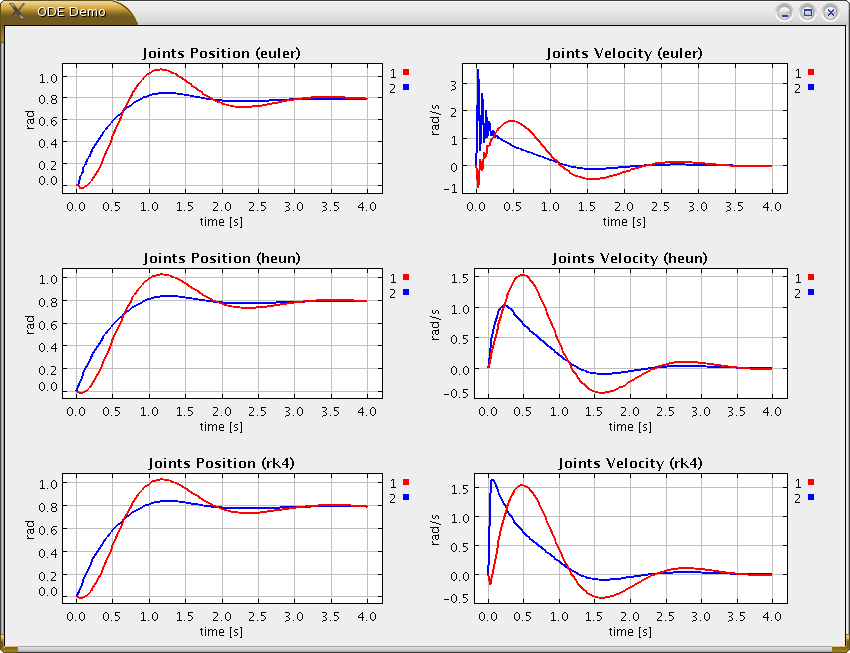
- Differential equation solver demo.
-
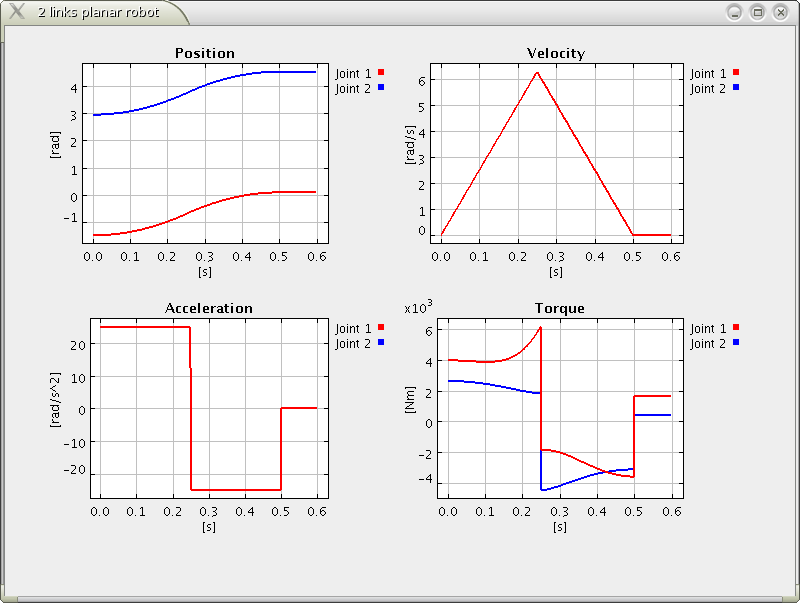
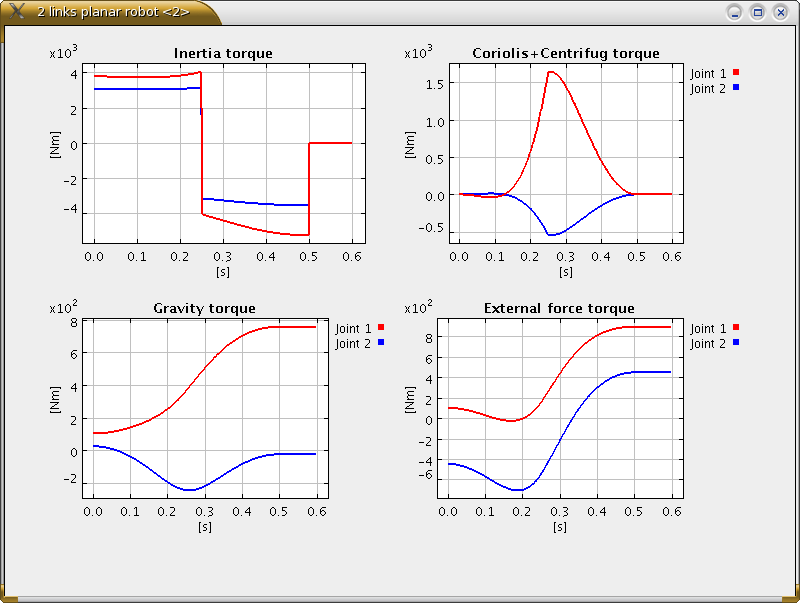
RNE
algorithm for 2 links planar robot. Solution of
problem 4.6 from «Modelling and Control of Robot
Manipulators» by Sciavicco, Siciliano(2nd Edition).
{kind=link}
{kind=link}
{kind=link}
{kind=link}