Overview - Controllers
This page shows the control functions implemented in
JRoboOp.
- Proportional derivative control with gravity
compensation for 2 links planar robot. Solution of
problem 6.10 from «Modelling and Control of Robot
Manipulators» by Sciavicco, Siciliano(2nd Edition).
- Control torque method for 2 links planar
robot. Solution of problem 6.12(compensated load mass)
from Sciavicco's book.
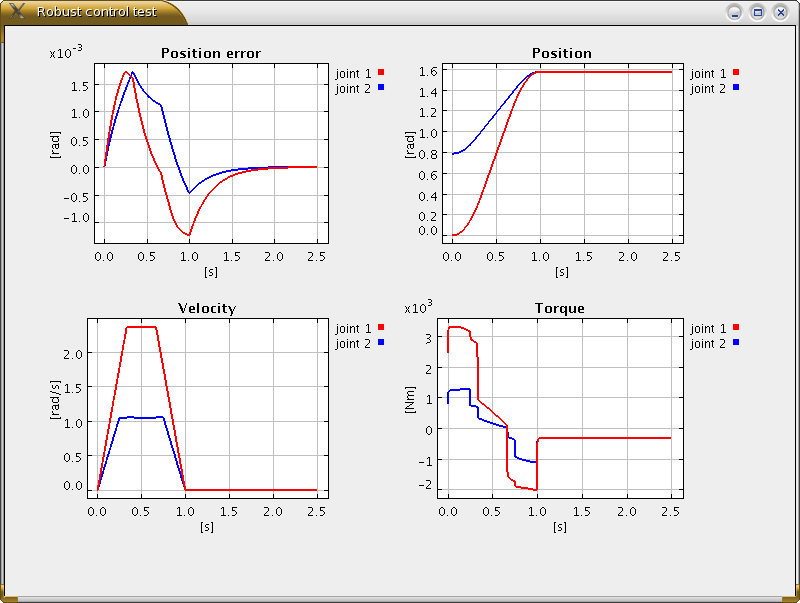
- Robust Control for 2 links planar robot. Solution
of problem 6.13 from Sciavicco's book.
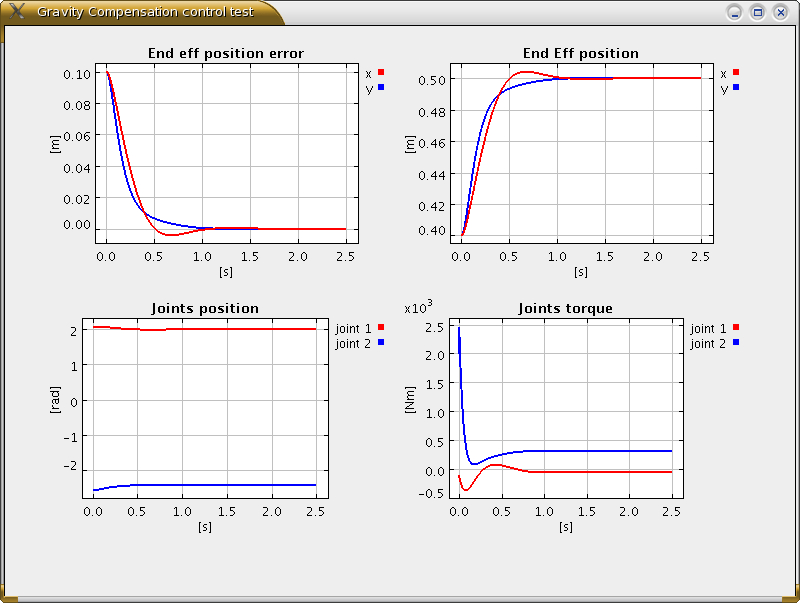
- End effector control with Gravity compensation for 2
links planar robot. Solution of problem 6.15(compensated
load mass) from Sciavicco's book.
- Resolved Rate Acceleration end effector control for 2
links planar robot. Solution of problem 6.16(compensated
load mass) from Sciavicco's book.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}