 javax.robotics.engine.JRoboOp
javax.robotics.engine.controllers.ComputedTorque
javax.robotics.engine.JRoboOp
javax.robotics.engine.controllers.ComputedTorque
|
|||||||||
| PREV CLASS NEXT CLASS | FRAMES NO FRAMES | ||||||||
| SUMMARY: NESTED | FIELD | CONSTR | METHOD | DETAIL: FIELD | CONSTR | METHOD | ||||||||
java.lang.Object
public class ComputedTorque
This class implements Computed Torque Method joints position controller. The
scheme of the control:
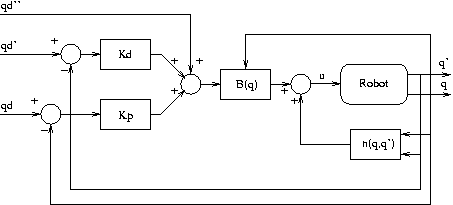
the dynamics model of robot:
B(q)*q'' + n(q,q') = u, n(q,q') = C(q,q')*q'+ Fq'+ g(q)
Wrapper class for C++ library ROBOOP.
| Field Summary |
|---|
| Fields inherited from class javax.robotics.engine.JRoboOp |
|---|
ID, Version |
| Fields inherited from interface javax.robotics.engine.controllers.JointController |
|---|
WRONG_SIZE |
| Constructor Summary | |
|---|---|
ComputedTorque(Robot robot,
DMatrix Kp,
DMatrix Kd)
Computed Torque Method position controller class constructor. |
|
ComputedTorque(Robot robot,
double[] Kp,
double[] Kd)
Computed Torque Method position controller class constructor. |
|
| Method Summary | |
|---|---|
short |
getID()
Gets Controller class ID. |
DMatrix |
getKd()
Gets the velocity error gain matrix. |
DMatrix |
getKp()
Gets the position error gain matrix. |
short |
getRobotID()
Gets Robot class ID linked to controller. |
short |
setKd(DMatrix Kd)
Sets the velocity error gain matrix. |
short |
setKd(double[] Kd)
Sets the velocity error gain matrix. |
short |
setKp(DMatrix Kp)
Sets the position error gain matrix. |
short |
setKp(double[] Kp)
Sets the position error gain matrix. |
double[] |
torqueCmd(double[]... qd)
Sets the output torque for a desired joint position and velocity. |
RVector |
torqueCmd(RVector... qd)
Sets the output torque for a desired joint position and velocity. |
| Methods inherited from class java.lang.Object |
|---|
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait |
| Constructor Detail |
|---|
public ComputedTorque(Robot robot,
DMatrix Kp,
DMatrix Kd)
robot - Robot class.Kp - diagonal matrix joint position error gain matrix.Kd - diagonal matrix joint velocity error gain matrix.
public ComputedTorque(Robot robot,
double[] Kp,
double[] Kd)
robot - Robot class.Kp - diagonal matrix joint position error gain matrix.Kd - diagonal matrix joint velocity error gain matrix.| Method Detail |
|---|
public final short getID()
getID in interface ControllergetID in class JRoboOppublic final short getRobotID()
Controller
getRobotID in interface Controllerpublic final DMatrix getKp()
JointController
getKp in interface JointControllerpublic final DMatrix getKd()
JointController
getKd in interface JointControllerpublic short setKp(DMatrix Kp)
JointControllerCall C++ method
set_Kp(const DiagonalMatrixr &Kp)
setKp in interface JointControllerKp - position error gain diagonal matrix
public short setKp(double[] Kp)
Kp - position error gain diagonal matrix
public short setKd(DMatrix Kd)
JointControllerCall C++ method
set_Kd(const DiagonalMatrixr &Kd)
setKd in interface JointControllerKd - velocity error gain diagonal matrix
public short setKd(double[] Kd)
Kd - velocity error gain diagonal matrix
public double[] torqueCmd(double[]... qd)
torqueCmd in interface JointControllerqd - array of desired joints position, joints velocity and joints
acceleration.
public RVector torqueCmd(RVector... qd)
torqueCmd in interface JointControllerqd - array of desired joints position, joints velocity and joints
acceleration.
|
|||||||||
| PREV CLASS NEXT CLASS | FRAMES NO FRAMES | ||||||||
| SUMMARY: NESTED | FIELD | CONSTR | METHOD | DETAIL: FIELD | CONSTR | METHOD | ||||||||