La convenzione di Denavit-Hartenberg è una procedura che
permette il calcolo della cinematica diretta per strutture complesse di
manipolatori. La procedura consiste in due fasi, nella prima fase
vengono assegnate le terne cartesiane solidali a ciascun braccio e
nella seconda vengono definiti i parametri cinematici (parametri DH)
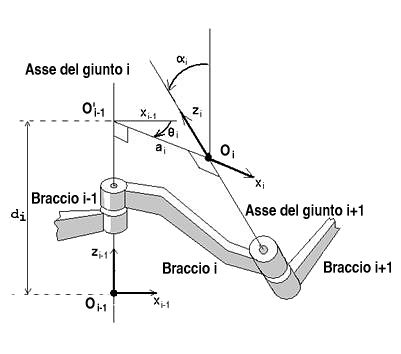
che caratterizzazo tali terne4.2. Nella figura 4.1 sono mostrati i parametri
DH che definiscono posizione e orientamento della terna del braccio ![]() rispetto alla terna del braccio
rispetto alla terna del braccio ![]() .
.
|
la retta passante per i punti
|
L'applet presentato permette la costruzione di un modello in grafica 3D di un manipolatore a catena cinematica aperta, in base ai parametri DH di ciascun braccio. All'apertura della pagina HTML, l'applicazione mostra un pannello Java3D praticamente vuoto, con la sola immagine di una terna cartesiana che rappresenta la terna di base, nel pannello laterale invece, si evidenzia una tabella che serve ad introdurre i parametri DH per ciascun braccio.
Esploriamo le possibilità dell'applicazione costruendo, come esempio le strutture di manipolatori già noti.