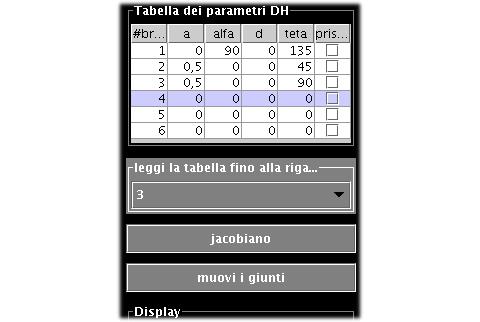
Il manipolatore è caratterizzato dalla seguente tabella dei parametri DH:
Ora per costruire il manipolatore diamo dei valori numerici ai
parametri, ad esempio: ![]() [m],
[m], ![]() ,
, ![]() e
e ![]() . Prima di trascriverli nella
tabella dell'applet come mostrato dalla figura
cap:Tabella-dei-parametri,
. Prima di trascriverli nella
tabella dell'applet come mostrato dalla figura
cap:Tabella-dei-parametri,
Inserendo i valori nella tabella, si vedrà immediatamente nel pannello Java3D, costruirsi il modello 3D del robot. Il risultato è quello mostrato dalla figura cap:Modello-3D-del. Nella figura sono evidenziate le terne dei bracci; la terna 0 coincide con quella di base.
Sul display del pannello laterale appare:
T=
-0.70710677, -4.3297803E-17, 0.70710677, 0.0
0.70710677, -4.3297803E-17, 0.70710677, 0.0
0.0, 1.0, 6.123234E-17, 0.0
0.0, 0.0, 0.0, 1.0
T=
-0.5, 0.5, 0.70710677, -0.25
0.5, -0.5, 0.70710677, 0.25
0.70710677, 0.70710677, 6.123234E-17, 0.35355338
0.0, 0.0, 0.0, 1.0
T=
0.5, 0.5, 0.70710677, -1.110223E-16
-0.5, -0.5, 0.70710677, 8.326673E-17
0.70710677, -0.70710677, 6.123234E-17, 0.70710677
0.0, 0.0, 0.0, 1.0 .
![\includegraphics[ scale=0.8]{fig/dh_model.eps}](img25.png)