 javax.robotics.engine.clik.ClikJacobianInverse
javax.robotics.engine.clik.ClikJacobianTranspose
javax.robotics.engine.clik.ClikJacobianInverse
javax.robotics.engine.clik.ClikJacobianTranspose
|
|||||||||
| PREV CLASS NEXT CLASS | FRAMES NO FRAMES | ||||||||
| SUMMARY: NESTED | FIELD | CONSTR | METHOD | DETAIL: FIELD | CONSTR | METHOD | ||||||||
java.lang.Object
public class ClikJacobianTranspose
Closed Loop Inverse Kinematics with Jacobian transpose. The class implements
this scheme:
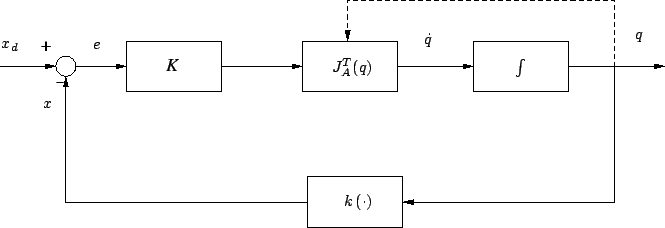
The orientation error is computed as quaternion error.
The integration method used is the forward Euler.
| Constructor Summary | |
|---|---|
ClikJacobianTranspose(Robot robot,
DMatrix Kp,
DMatrix Ko)
Costructor with default sample time, dt = 1e-3. |
|
ClikJacobianTranspose(Robot robot,
DMatrix Kp,
DMatrix Ko,
double dt)
Costructor. |
|
| Method Summary | |
|---|---|
void |
step(RVector3d pd,
RVector3d ppd,
Quaternion quatd,
RVector3d wd)
Compute the joints position and velocity from a given desired end effector position and orientation. |
| Methods inherited from class javax.robotics.engine.clik.ClikJacobianInverse |
|---|
getEps, getJointsPosition, getJointsVelocity, getKo, getKp, getLambdaMax, getOrientationError, getPositionError, getSampleTime, setEps, setKo, setKp, setLambdaMax, setSampleTime |
| Methods inherited from class java.lang.Object |
|---|
clone, equals, finalize, getClass, hashCode, notify, notifyAll, toString, wait, wait, wait |
| Constructor Detail |
|---|
public ClikJacobianTranspose(Robot robot,
DMatrix Kp,
DMatrix Ko)
robot - the robot.Kp - the diagonal matrix of error position gain.Ko - the diagonal matrix of error orientationo gain.
public ClikJacobianTranspose(Robot robot,
DMatrix Kp,
DMatrix Ko,
double dt)
robot - the robot.Kp - the diagonal matrix of error position gain.Ko - the diagonal matrix of error orientationo gain.dt - the sample time.| Method Detail |
|---|
public void step(RVector3d pd,
RVector3d ppd,
Quaternion quatd,
RVector3d wd)

step in interface CLIKstep in class ClikJacobianInversepd - the vector of desired end effector position.ppd - input parameter not considered.quatd - the desired end effector quaternion.wd - input parameter not considered.
|
|||||||||
| PREV CLASS NEXT CLASS | FRAMES NO FRAMES | ||||||||
| SUMMARY: NESTED | FIELD | CONSTR | METHOD | DETAIL: FIELD | CONSTR | METHOD | ||||||||