Gli applet che riguardano l'esercitazione mettono a disposizione uno schema del CLIK dove i blocchi per la pianificazione della traiettoria, la cinematica diretta e la cinematica diff. inversa sono vuoti. Affinché il CLIK funzioni lo studente deve scrivere il codice che realizza le funzioni dei blocchi (figura 5.9).
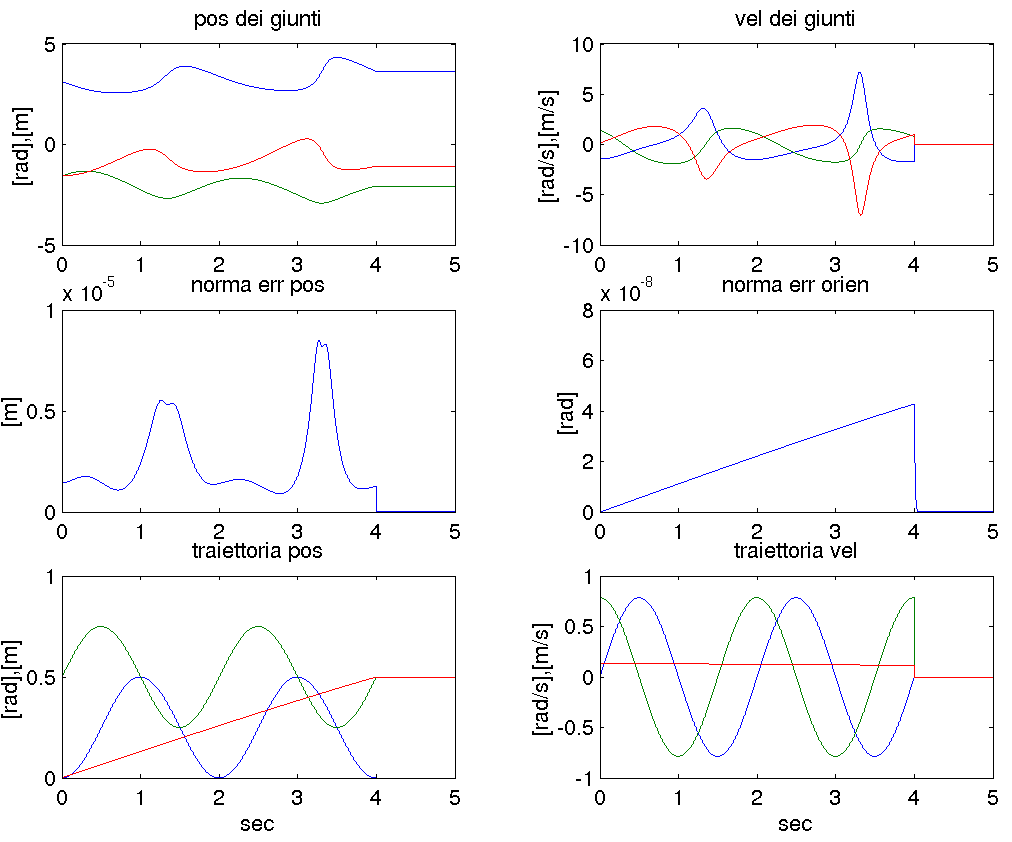
Facciamo un esempio.Prendiamo ancora il manipolatore planare a 3 bracci dell'esempio precedente 5.1.1e cerchiamo di riprodurre nuovamente i risultati presentati nel paragrafo 3.7.4 di [Lorenzo Sciavicco(2000)], ma questa volta in maniera esatta.
Implementiamo l'algoritmo per l'inversione cinematica che utilizza l'inversa dello Jacobiano.
Accediamo all'applet ricalcando la procedura precedente e una volta caricata l'applicazione, si noterà che il pannello laterale è cambiato; sono presenti le funzioni pian.traiettoria, cinemat.diretta,cinemat.inversa che se attivate, aprono altrettante finestre Java (figura cap:Esercitazione,-pannello-laterale ). Nelle finestre è possibile scrivere il codice del linguaggio Matlab che realizza la funzione che ad ognuna di esse è associata:
function sys = mdlOutputsTrj(t,x,u)
% funzione per la pianificazione della traiettoria desiderata
% vettori di ingresso u,t:
% u(1) istante finale.
% t istante corrente.
% vettore (colonna) d'uscita
% sys=traiettoria desiderata della terna utensile
% pos e orien e derivate.
% *** inserisci qui il tuo codice ***
tf= u(1); % istante finale
%calcolo della traiettoria desiderata
if (t >= 4.0)
xd= [0; 0.5; 0.5];
Dxd= [0; 0; 0];
else
xd= [0.25*(1-cos(pi*t)); 0.25*(2+sin(pi*t)); sin(pi/24*t)];
Dxd= [0.25*pi*sin(pi*t); 0.25*pi*cos(pi*t); pi/24*cos(pi/24*t)];
end;
sys= [xd; Dxd];
function sys = mdlOutputsDirKine(t,x,u)
% funzione per la cinematica diretta
% vettore d'ingresso u:
% u(1:3) posizione dei giunti.
% vettore (colonna) d'uscita
% sys=posizione e orientamento della terna utensile
% *** inserisci qui il tuo codice ***
% u(1)-> teta1
% u(2)-> teta2
% u(3)-> teta3
a(1)=.5;
a(2)=.5;
a(3)=.5;
c1= cos(u(1));
c12= cos(u(1)+u(2));
c123= cos(u(1)+u(2)+u(3));
s1= sin(u(1));
s12= sin(u(1)+u(2));
s123= sin(u(1)+u(2)+u(3));
sys= [a(1)*c1+a(2)*c12+a(3)*c123;...
a(1)*s1+a(2)*s12+a(3)*s123;...
u(1)+u(2)+u(3)];
function sys = mdlOutputsInvKine(t,x,u)
% funzione per l'inversione cinematica
% vettore d'ingresso u:
% u(1:3) errore;
% u(4:6) posizione dei giunti;
% u(7:9) velocità desiderata
% vettore (colonna) d'uscita
% sys=velocità dei giunti
% *** inserisci qui il tuo codice ***
K=diag([500,500,100]);
% algoritmo con inversa dello jacobiano
J=J_a(u(4:6));
% calcolo del prodotto inv(Ja(q))*u
dq = J\(u(7:9)+K*u(1:3));
sys= dq;
% end mdlOutputs
function Ja = J_a(u)
% funzione per il calcolo dello Jacobiano
% u(1) -> teta1
% u(2) -> teta2
% u(3) -> teta3
a(1)=.5;
a(2)=.5;
a(3)=.5;
s12= a(2)*sin(u(1)+u(2));
s123=a(3)*sin(u(1)+u(2)+u(3));
c12= a(2)*cos(u(1)+u(2));
c123=a(3)*cos(u(1)+u(2)+u(3));
Ja=[-a(1)*sin(u(1))-s12-s123, -s12-s123, -s123;...
a(1)*cos(u(1))+c12+c123, c12+c123, c123;...
1, 1, 1];
|
|