|
Marco Martignon |
|
Ingegnere Elettronico, Biomedico Specializzato in Ingegneria Clinica |

|
Analisi segnali biomedici |
|
Analisi in Multirisoluzione |
|
Descrizione del Software |
|
Uso del Software |
|
Risultati confronti |
|
Modelli AR |
|
Test modelli AR |
|
Estrazione dei segnali |
|
Modelli AR |
|
I dati che precedentemente ti ho inviato sono stati rilevati usando il seguente schema di principio:
Prefiltraggio: Consiste nell’applicare un filtro per limitare in banda il segnale, prima che vanga eseguito il campionamento, questo perché venga eliminato il problema dell’aliasing che inevitabilmente mi introdurrebbe componenti in banda non proprie del segnale. In particolare deve essere: fc ³ 2B dove B è la banda del segnale, in particolare una volta nota (o supposta nota) è necessario limitare la banda del segnale, necessariamente estesa dai rumori che vi si sovrappongono e campionare con frequenza in teoria sopra specificata ma in pratica circa 4/5 volte la banda, questo perché il filtro (non essendo ideale) attenua le frequenze superiori con una certa gradualità. Questa operazione spero a mio avviso sia stata fatta. Nei segnali a disposizione le banda a 3kHz è comune a tutti , ciò che li distingue è la banda superiore ai 3kHz. Filtro digitale: Serve per "depurare" ulteriormente il segnale dal rumore da cui è affetto (una volta noto il rumore). Predittore: è il modello AR di ordine "n" in forma di predizione al quale vengono applicati in ingresso "n-1" campioni e ne stima il campione n-esimo. Test Errore di Predizione: Esegue il test sull’errore di predizione in senso statistico: En=Sn-Yn Del quale viene valutata media e correlazione che, facendo riferimento al rumore bianco come rappresentativo dell’errore, deve essere a media nulla e varianza unitaria ( nell’origine e zero altrove) entro certe fascie di tolleranza. ESEMPIO: Segnale composto da due sinusoidi. Esempio di identificazione di un modello AR e sua applicazione. Dati: Consideriamo un segnale con le seguenti caratteristiche: · è composto da 2 sinusoidi a frequenza 1kHz e 4kHz. · È stato campionato con frequenza 22050 Hz ( o campioni al secondo). · Generato con 22050 campioni per rilevazione di un secondo, è stato ridotto ai primi 16384 campioni per semplicità di calcolo (essendo potenza di due), inoltre visto che è stazionario per costruzione non è rilevante considerare molti campioni.
Quindi: fc @ 5 B (>> 2B) (teorema del campionamento ampiamente rispettato) .
Segnale generato: A fianco lo spettro del segnale sopra in cui sono evidenti le due frequenze a 1kHz e 4kHz. Analizziamo lo spettrogramma ossia la rappresentazione nel piano (t,f) della densità spettrale del segnale. Questo tipo di rappresentazione è utile per capire il contenuto in frequenza del segnale lungo l’intervallo temporale.
È evidente come sia costantemente presente la componente a 1kHz e a 4kHz dimostrando come era ovvio la stazionarietà del segnale o meglio la non varianza delle sue componenti. I colori scuri rappresentano la maggior concentrazione della densità spettrale. Questo tipo di rappresentazione può meglio essere esposta in un piano 3D riportata a lato dove ancora una volta si notano le densità spettrali delle componenti del segnale nettamente separate fra loro. La rappresentazione piana è anche interpretabile come la proiezione sul piano 2D (t,f) della densità spettrale.
ESEMPIO: sin1-4k corrotto da rumore bianco gaussiano. Verifichiamo di seguito come sia possibile applicare le operazioni di post-filtraggio digitale a valle della conversione A/D. Precedentemente ti avevo spedito un Mail con l’effetto di riduzione del rumore applicando l’averaging e come questo abbia l’effetto di aumentare il rapporto segnale rumore di un fattore N pari al numero di realizzazioni del segnale considerate. Questa tecnica è indubbiamente la migliore nel caso di rumore bianco ma presenta l’inconveniente di dover effettuare più rilevazioni sicuramente diverse fra loro a causa dell’invitabile introduzione di artefatti ad esempio dovuti a spostamenti del paziente. Esistono altre vie per far questa operazione ovviamente meno precisa ma con la quale si ottengono buoni risultati. Sommiamo a questo proposito al segnale sopra descritto un rumore bianco ed applichiamo un filtro a media mobile(Moving Average) detto anche MA-filter. Vediamo il risultato in uscita. I Segnali rilevati nonostante siano stati opportunamente protetti e schermati nella rilevazione saranno sicuramente soggetti in ogni caso a rumore bianco intrinsecamente sovrapposto al segnale rilevato per quest un operazione di questo tipo è quanto meno indispensabile magari da applicare in maniera non molto pesante.
Il problema è stabilire se vi sono altre fonti di rumore ad esempio di tipo impulsivo o laplaciano. In questo caso bisognerebbe considerare anche l’applicazione di filtri anti rumore impulsivo detti anche mediani. Molto spesso alternativamente all’applicazione di più filtri in cascata si preferisce utilizzare un filtro che raggruppi in se proprietà sia dell’uno che dell’altro tipo detti anche TRIMMED MEDIAN FILTER. Si tratta in sostanza di far susseguire step by step entrambe le operazioni piuttosto che vengano applicate globalmente prima l’una e poi l’altra sul segnale.
Segnale corrotto da rumore con ampiezza dello stesso ordine di grandezza dell’ampiezza del segnale (poiché per questi segnali il rumore ha lo stesso ordine di grandezza). Come si nota infatti il segnale sinusoidale risulta completamente indistinguibile, perlomeno nel tempo. In frequenza come si nota la presenza delle componenti spettrali è ancora ben visibile, ,a altamente sovrapposta da componenti che si presentano in tutto il campo di frequenza. Il tutto risulta meglio evidente nella rappresentazione tempo frequenza, dove si nota maggiormente l’effetto del rumore bianco equamente distribuito nel paino.(colore rosso)
Applichiamo un modello AR per il filtraggio del segnale e analizziamolo: Come si nota lo spettro è stato altamente recuperato, ed il segnale si avvicina notevolmente al segnale originario a dimostrazione della predizione di un filtro AR (o IIR).
Vediamo le altre rappresentazioni:
Si nota che il rumore bianco è stato praticamente eliminato dal filtro AR, quindi abbiamo ottenuto un modo per depurare il segnale dal rumore bianco. L’ordine di questo filtro è stato stimato di 67.
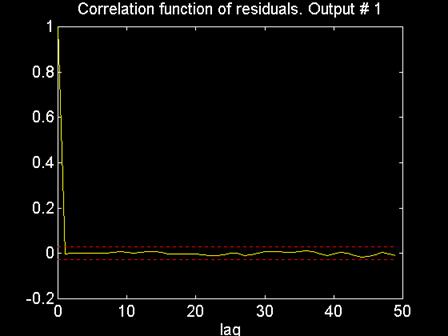
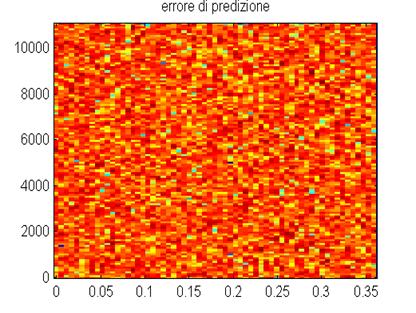
La correlazione dell’errore di predizione del modello AR è quindi: Questa rappresenta l’indice di bontà della mia predizione e costituisce il test sul segnale, in figura sopra. Del resto questo ben si nota nelle figure 2D e 3D sopra rispetto alle medesime per il segnale prima dell’applicazione del modello AR. Per completezza riporto l’errore di predizione di cui sopra si ha la correlazione per evidenziarne la bianchezza e la sua gaussianità, questo è ovviamente, come la correlazione indice di buona predizione infatti: e(t)=y’(t) – y(t) dove y’ rappresenta l’uscita del modello AR in forma di predizione (campione stimato).
Va sottolineato il fatto che il segnale deve essere stazionario, infatti essendo il modello lineare predice il comportamento di un segnale che segue un certo andamento e quindi prevedibile, in caso contrario la previsione non sarà corretta. |