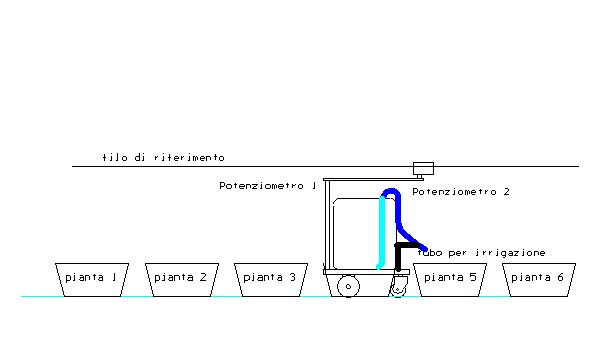
Schema di principio del robot annaffiatore
Visto di fronte si configura come un carello con due ruote motrici ed una ruota libera di orientarsi secondo il moto.
I potenziometri 1 e 2 insieme alla posizione del cursore sul filo di riferimento contribuiscono a fornire i dati che permettono al controllore BX-24
( ma si può utilizzare anche i controllori PICAXE ) di determinare le coordinate del tubo irroratore.
pagina precedente pagina successiva ritorno all'indice