Modello matematico per i movimenti e le posizioni (x,y) del robot annaffiatore
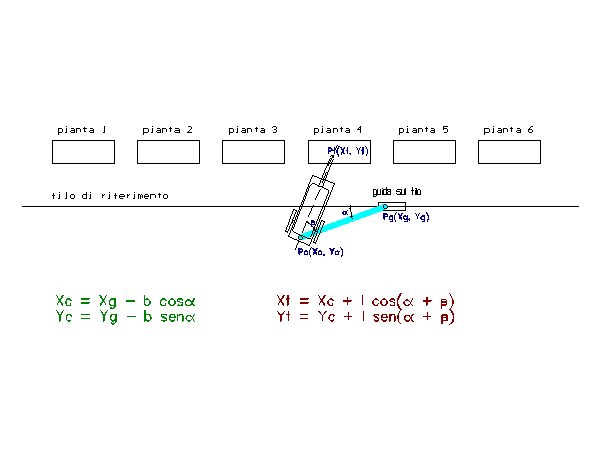
Nelle formule delle coordinate b corrisponde alla lunghezza del "braccio" che collega il carrello alla guida che scorre sul filo, mentre l corrisponde alla distanza del cardine del braccio sul carrello e l'estremità del tubo annaffiatore.
In base ai valori forniti dai potenziometri posti in corrispondenza dei punti Pg e Pc il controllore BX-24 determina il valore degli angoli α e β; note le coordinate della guida che scorre sul filo di riferimento Pg(Xg,Yg), tramite le formule trigonometriche il sistema di elaborazione BX-24 calcola le coordinate Pt(Xt,Yt) relative all'estremità del tubo annaffiatore.
Agendo sui motori delle due ruote motrici Ms (ruota motrice sinistra) ed Md (ruota motrice destra) il sistema di elaborazione muove il carrello in modo da rendere le cordinate di Pt di valore tale da risultare all'interno dell'area occupata dall'i-esima pianta (es. dalla pianta n.4)
pagina precedente pagina successiva ritorno all'indice