|
DIVISORE CNC
| Questo progetto
si è protratto per più di un anno a causa delle problematiche
incontrate durante la stesura del software di controllo, mi scuso quindi
con coloro che più di una volta me ne hanno sollecitata la
pubblicazione, ma , che volete, volevo avere la certezza che tutto
funzionasse a dovere ( e comunque ancora non ce l'ho, al cento per cento
;-( ), poichè troppo spesso si incontrano progetti
funzionanti solo "sulla carta" e quindi totalmente inutili ...
Come ha detto qualcuno ... il vero orgoglio non è fare
qualcosa, ma dare la possibilità ad altri di rifare la stessa cosa !
Quindi ?! veniamo a noi...
Il progetto si compone di :
1 _ La parte meccanica
2 _ La parte elettronica
3 _ Il Software di controllo
Premetto che il progetto non è esattamente semplice, sopratutto per
ciò che riguarda la parte meccanica, in particolare il fissaggio del
motore passo_passo (nel mio caso sul mandrino del tornio), che è
demandato all'esperienza personale e all'attrezzatura a disposizione,
per cui questa parte non la starò a descrivere essendo molteplici le
soluzioni da poter utilizzare e tutte ugualmente funzionali.
Diverso, è il discorso per la parte elettronica, questa parte è
decisamente semplice, grazie anche a www.nuovaelettronica.it,
che fornisce un kit per il pilotaggio di motori passo_passo bipolari
(quelli con solo 4 fili !) e che, con qualche piccola modifica si è
prestato molto bene ad essere collegato alla porta parallela del PC.
Il Software di controllo ... è stato il vero lavoro impegnativo (
che non si è ancora concluso ...) ! E' scritto in QBASIC 7.1 e,
gira sotto il vecchio, caro DOS per i motivi spiegati qui. Dopo avere buttato giu' alcune
righe di codice per vedere se l'elettronica funzionava correttamente
sono sorte subito le prime necessità ... Ma, andiamo con ordine :
descrivo di seguito la parte elettronica e successivamente il
funzionamento del software.
|
|
|

|
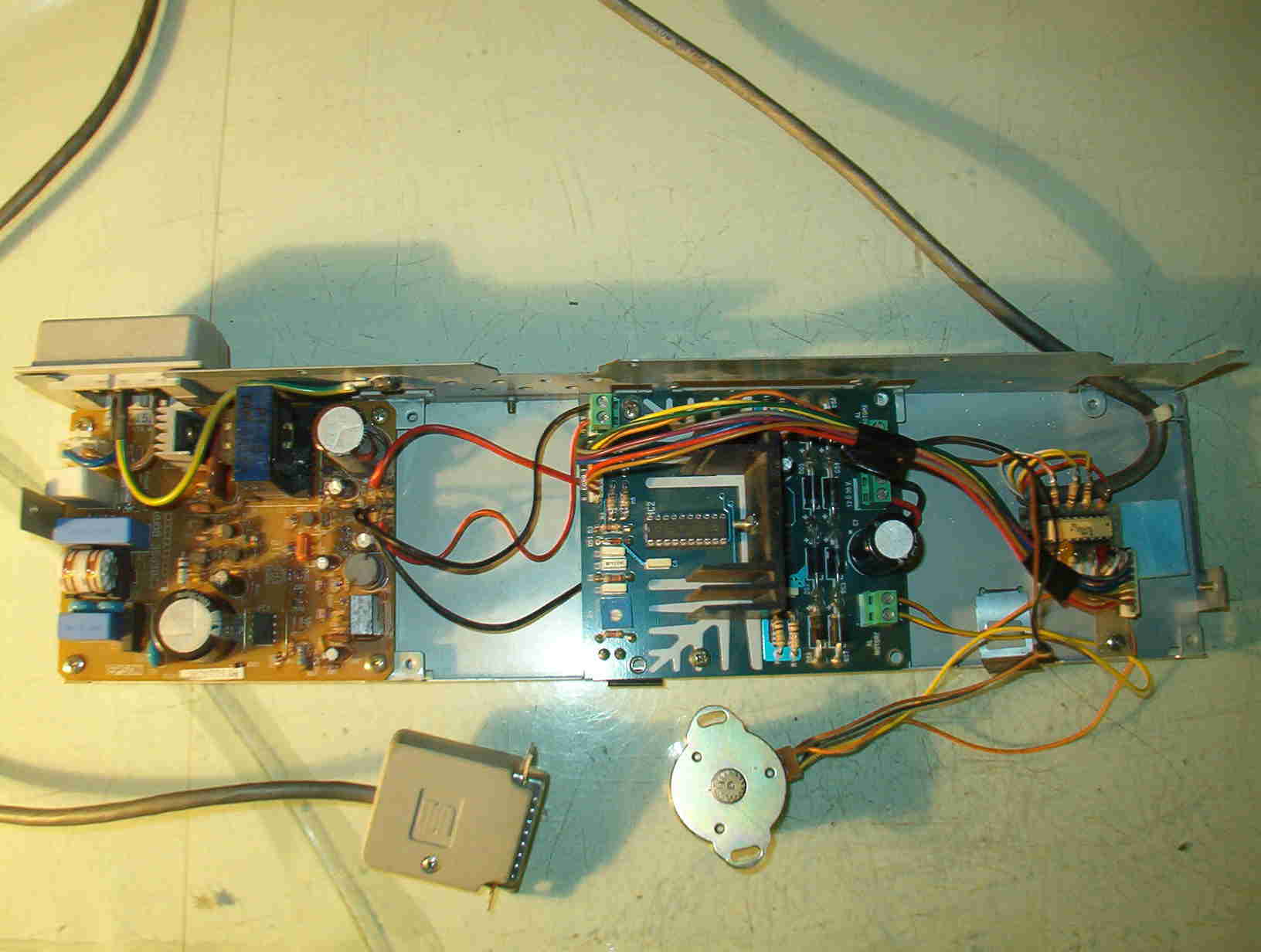
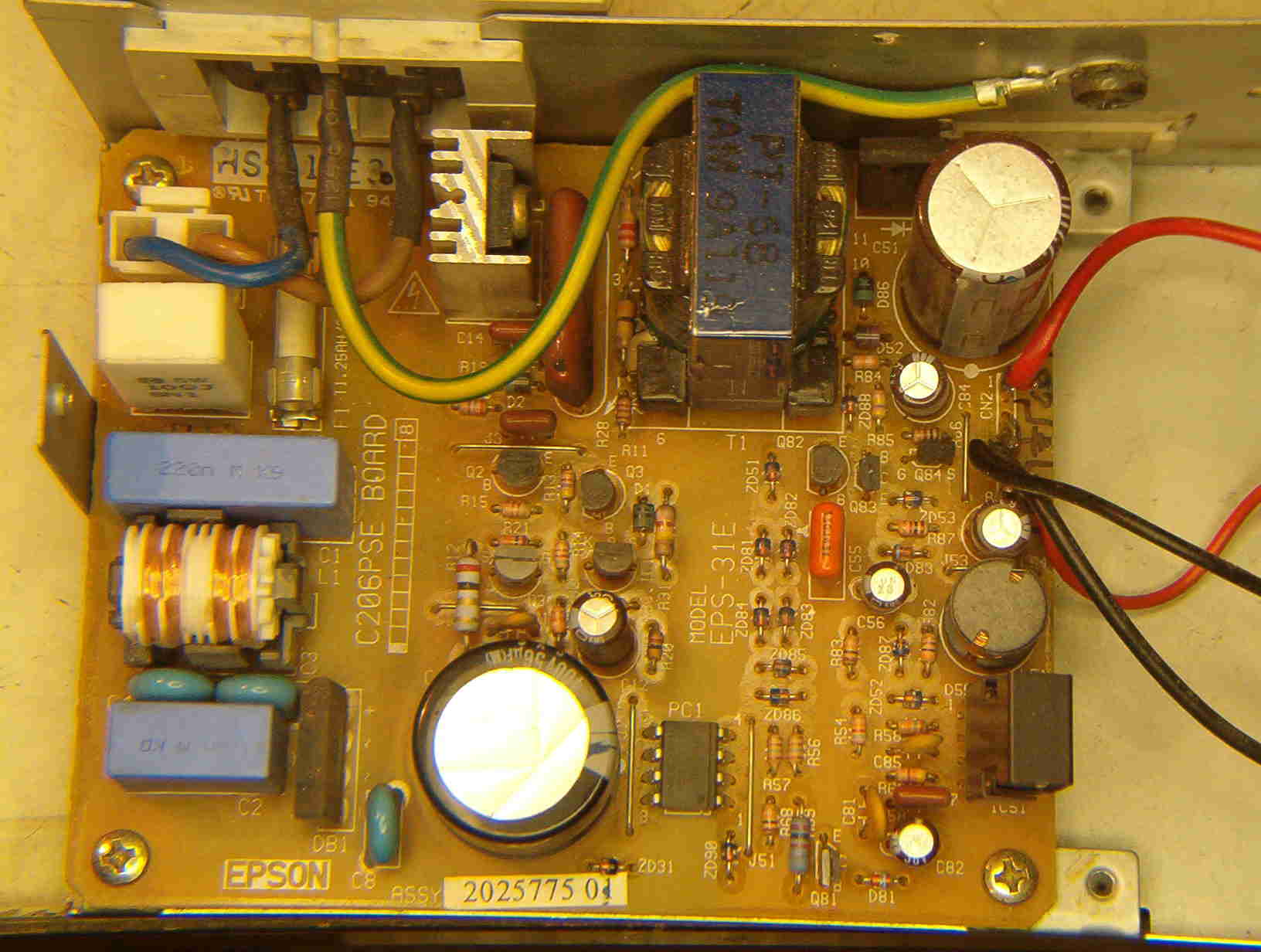
La foto a lato
mostra l'elettronica di controllo nel suo insieme. Le parti necessarie
sono : un alimentatore in grado di fornire max 40 Volt per alimentare il
motore, 5 Volt per alimentare gli integrati della logica di controllo
(che io ho recuperato da una stampante Epson, circuito a sx della foto);
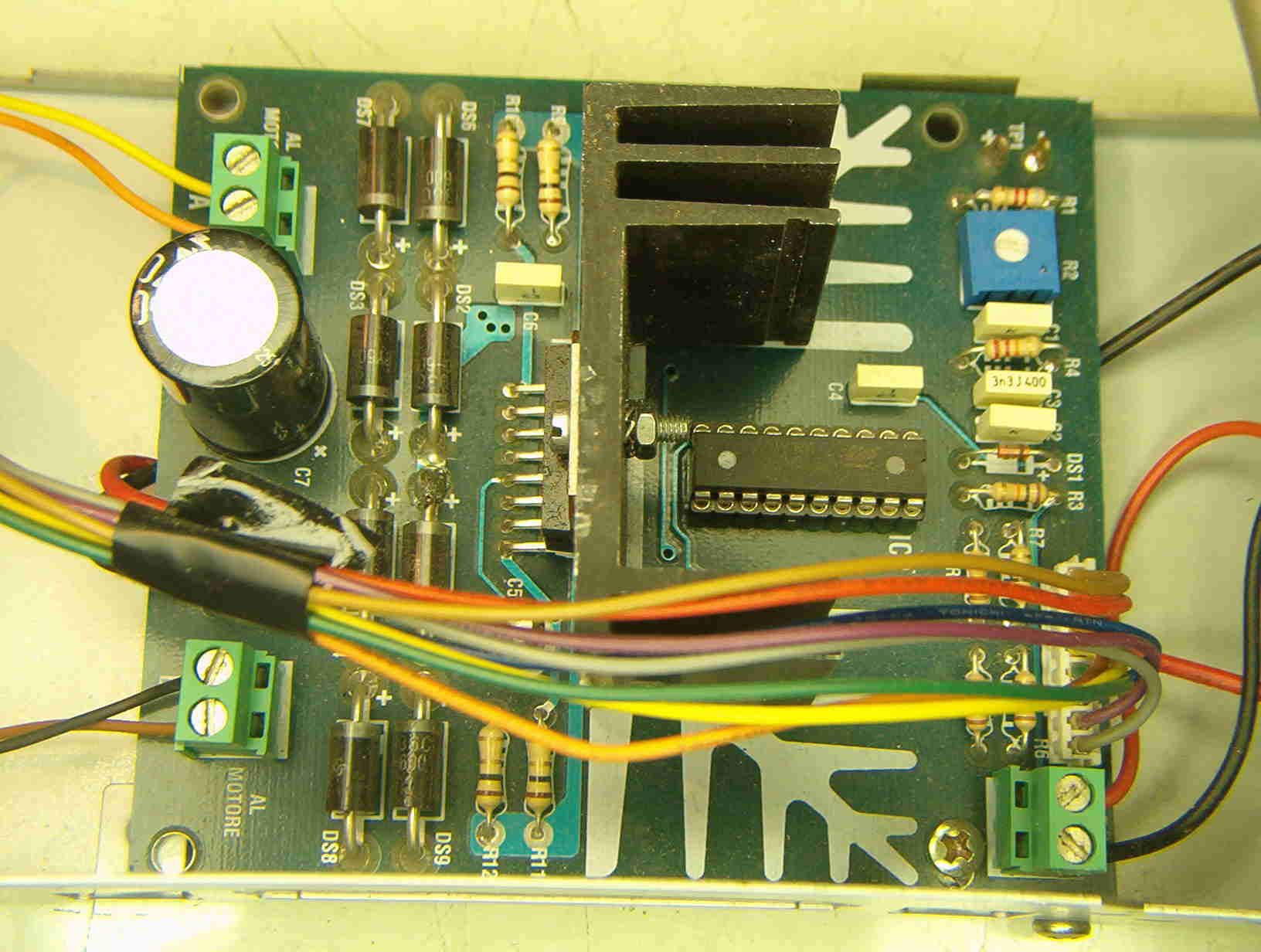
il circuito di controllo vero e proprio ( KIT LX 1420 di
nuovaelettronica, al centro della foto) ; una schedina di mia
progettazione per isolare otticamente il PC e preservarlo da eventuali
malfunzionamenti e/o cortocircuiti ( circuito a dx della
foto).
In basso, rispettivamente il cavo parallelo e un piccolo
motore per i test.
|
|
|
| Per gli amanti del "fai da
te" a lato la foto dello schema elettrico della logica di controllo
e qui
un tutorial per realizzare i PCB con il metodo della fotoincisione. Per
il disegno del PCB ... mi dispiace ma dovrete arrangiarvi, io avevo
troppa fretta di vedere se il circuito pilotato dal PC funzionava, ed ho
preferito prendere il Kit di Nuova Elettronica, pero' un domani forse
...
Lo schema di funzionamento è tipico della coppia di integrati L297 -
L298/N a cui i tecnici di nuova elettronica hanno aggiunto la sezione composta da R1-R2-R3-R4-DS1 per adattarlo a
tutti i tipi di motore, in pratica il trimmer R2, una volta alimentato
il circuito andrà ruotato fino a che il movimento del motore non
raggiunge una certa "forza". Se si esagera, potrebbe succedere
che il motorino si ferma e tende a vibrare, in questo caso basta
diminuire un po' la corrente perchè tutto ritorni normale.
|
|
| Dal conn 1 partono i fili che ho collegato ad una
piccola interfaccia cablata su basetta millefori, con lo scopo di
isolare otticamente tutto lo stadio di potenza dal PC. Ricordate, che la
porta parallela è integrata nella motherboard, un rientro di
tensione e/o un cortocircuito potrebbero portare all'inutilizzo del PC.
Quindi ... OCCHIO !!!
|
 |
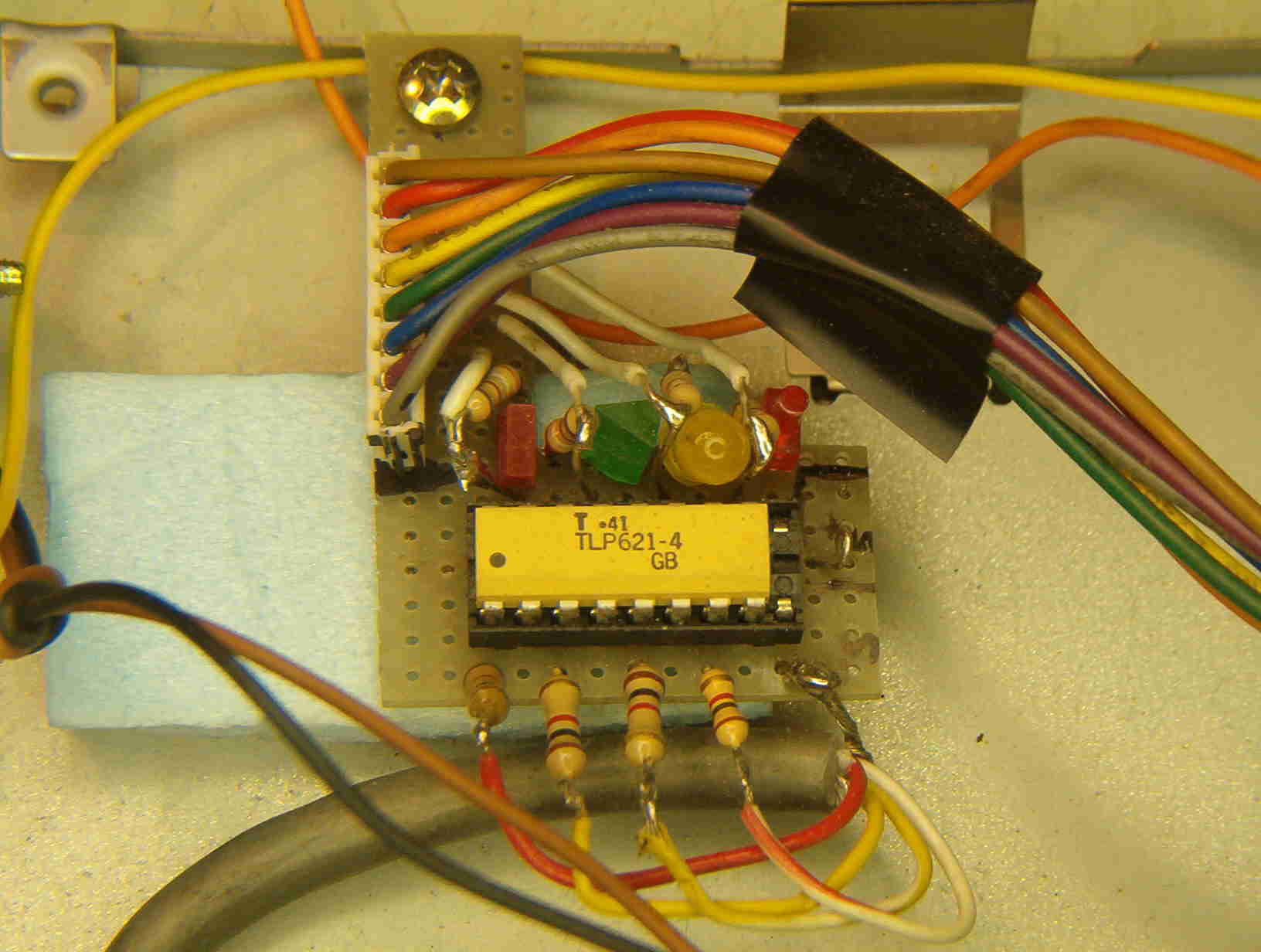
Con l'elettronica utilizzata,
risulta abbastanza semplice il pilotaggio, sono infatti necessari solo 4
fili che partono dalla porta parallela. Come visibile dalla foto a lato,
l'integrato siglato TLP 621/4 altro non è che un chip contenente 4
fotoaccoppiatori con isolamento di 5000 Volt. I diodi d'ingresso vengono
pilotati direttamente dal PC tramite le resistenze di limitazione da 1
Kohm, mentre i fototransistor in uscita pilotano quattro Led (che ho
inserito per rendemi conto dei segnali disponibili dal PC , ma che non
sono indispensabili per il funzionamento) e i pin 2-3-4-5 del connettore
1. |
|
| I pin di tale connettore sono numerati dall'1
al 6 e sono ripettivamente 1= +5Volt ; 2= Enable (un
segnale logico 1 fa muovere il motore con la velocità data dal segnale
di clock, un segnale logico 0 lo ferma) ; 3= Direction (a seconda
del segnale applicato, 1 o 0 il motore gira in un senso o nell'altro) ; 4=
Half/Full (a seconda del segnale applicato, 1 o 0 il motore funziona
a passo intero o a mezzo passo) ; 5= Clock (la frequenza
determina la velocità di rotazione del motore) ; 6= Ground (la
massa !) |
|
|
|
Nella foto sottostante è rappresentato lo schema
elettrico dell'interfaccia |
 |
|
|
| Rispettate rigorosamente la disposizione dei
vari fili sulla presa della parallela poichè il Software indirizza i
vari livelli logici a questi pin. |
|
Successiva >>
 |
Ultimo aggiornamento 20/05/2005 |
|






{kind=link}
{kind=link}
{kind=link}