| Ed ora ... il Sofware : Scritto come ho
già detto, con Qbasic 7.1, lo fornisco compilato stand-alone, cioè
senza bisogno di installare librerie o altri ammenicoli vari; lo si
lancia e lui va (almeno spero ;-)! ). E' Freeware, ed è utilizzabile
liberamente secondo le regole presenti nel Disclaimer
di questo sito. Io l' ho testato oltre che sul Dos, con sistemi operativi tipo WIN 95
- 98 - ME - XP senza riscontrare anomalie, lunico inconveniente è che,
se lo fate girare, senza avere attivato la modalita' Dos esclusiva,
potrebbe succedervi che mentre state lavorando un pezzo, il sistema vada
ad aggiornare le periferiche collegate facendo un checK delle porte e
togliendo di fatto il controllo al Software che ovviamente si bloccherà
mandando a quel paese il vostro lavoro ...
|
| Il SW è suddiviso in due blocchi principali
A = configurazione e B = funzionamento vero e proprio.
Siccome la maggior parte dei motori passo passo in mio possesso
proviene da materiale di recupero ( stampanti, fax, ecc. ) e quindi
molto diversi fra loro come caratteristiche , ho inserito il blocco A nell'eventualità che il motore in
uso si danneggiasse; nel qual caso basterebbe inserire sull'elettronica
un altro motore, eseguire il test per conoscere il numero di passi ed
automaticamente il SW eseguirebbe tutti i calcoli necessari tenendo
conto del numero di passi per giro del motore. Funzionale no ? (Al
momento è prevista soltanto la configurazione di motori BIPOLARI con
l'interfaccia della pagina precedente)
Per i motivi spiegati prima, siccome molti motori sono implementati
con riduttori ho inserito nel blocco A
la possibilità di configurare un eventuale riduttore
(inserendo il numero di denti delle varie ruote dentate) , che può
essere lineare (ad assi paralleli), oppure epicicloidale ( che devo
ancora programmare !!!). Anche in
questo caso il SW terrà conto del numero di passi del motore e del
rapporto di riduzione.
Tutto questo viene salvato in un file di configurazione che, una
volta lanciato il programma, deve essere caricato, permettendo cosi'
diverse configurazioni.
NOTA : Se non avete intenzione di usare il SW come
divisore, potete comunque usarlo come valido strumento per conoscere il
numero di passi di un motore o il rapporto di riduzione di un riduttore
di cui non conoscete le caratteristiche. |
|
|
|
Blocco A
configurazione del motore e del riduttore
|
| Al lancio del programma verrà chiesto se si
vuole configurare il sistema, se si risponde no compararirà la maschera
con i file di configurazione disponibili: ( foto sotto)
|
|

|
|
|
|
| altrimenti comparirà la maschera per la
configurazione |
|
|
 |
|
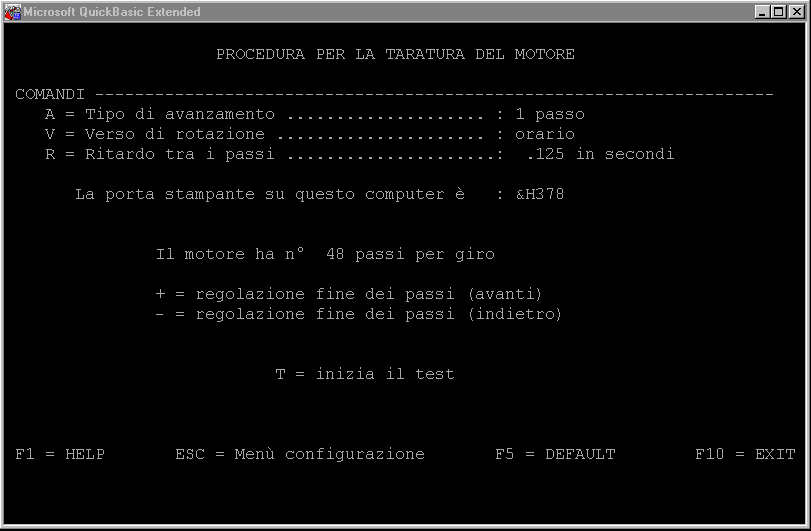
La maschera del menu' di configurazione |
|
|
|
Cominciamo con la configurazione del motore
|
|
|
|
|
Imposto i parametri che presumo abbia il mio motore
...
|
|
| ... ed eseguo il test del motore con i parametri
specificati nella maschera precedente. Se avete realizzato l'interfaccia
ed avete un motore collegato, ad ogni pallino corrisponde un movimento
del motore (passo !). Nella guida del SW è spiegato come e perchè
eseguire la taratura del motore. |

|
|
|
|
|
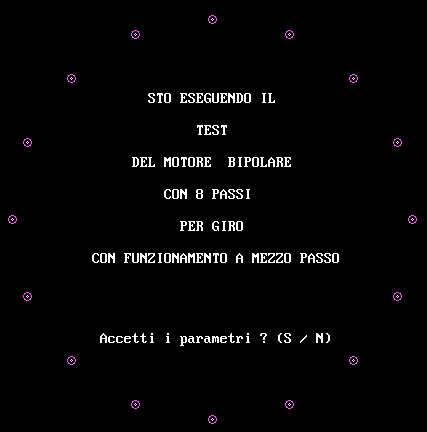
Ecco un altro esempio con le impostazioni modificate:
8 passi per giro, funzionamento a mezzo passo . Se contate i pallini
vedrete che sono 16 perchè 16 sono gli impulsi che devono essere
inviati ad un motore che ha 8 passi per giro, per fargli compiere un
giro completo con funzionamento a mezzo passo.
Nota : Per evidenziare il funzionamento a mezzo passo i
pallini hanno un puntino al centro. |
|
|



