|
REALIZZARE UN DRIVER PER PICCOLI MOTORI CON GLI INTEGRATI 74HC240 - 74HC245
|
|
Gli integrati 74HC240 e 74HC245 possono essere usati per realizzare dei driver per piccoli motori (max 100mA).
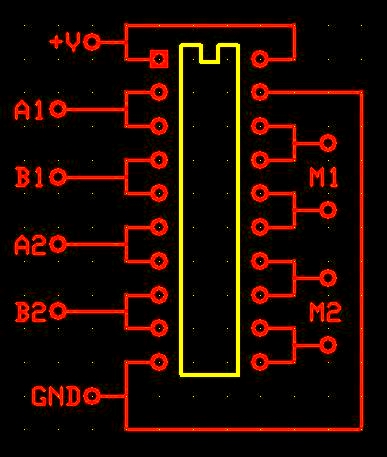
Il 74HC240 è un octal-buffer inverting, cioè contiene 8 buffer invertenti, divisi in 2 gruppi di 4; ciascun gruppo ha un comando enable (pin 1 e 19) per abilitare o disabilitare i rispettivi buffer. Per utilizzarlo come driver di motori, basta collegarlo come indicato nello schema:
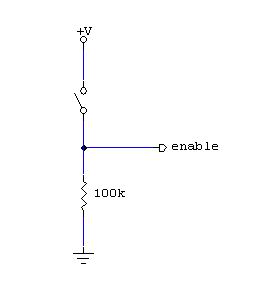
Gli ingressi A1-B1 comandano il motore M1, gli ingressi A2-B2 comandano il motore M2. Il comando enable (piedini 1 e 19) va normalmente collegato a massa. Se viene collegato al positivo, i buffer sono inibiti e, in pratica, il motore collegato a quelle porte non gira. Questa caratteristica permette di utilizzare gli ingressi enable per far sterzare le ruote del robot. Lo schema che segue mostra come collegare un sensore di contatto (bumper) ai piedini enable. Volendo si può aggiungere in parallelo alla resistenza un condensatore elettrolitico (provare valori da 10 a 47 mF):
Il 74HC245 contiene 8 transceiver bidirezionali, tutti abilitati da un piedino enable (pin 19). Siccome i transceiver sono bidirezionali, lo stato del piedino 1 stabilisce la direzione in cui scorrono i dati:
Anche se la flessibilità di questo integrato è inferiore a quella del 74HC240 (un solo piedino di enable), può essere facilmente utilizzato come driver collegandolo come segue:
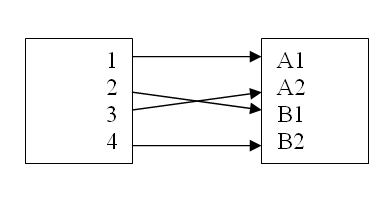
Come si vede, lo schema di montaggio è decisamente più semplice, rispetto al 74HC240. Gli ingressi A1-B1 comandano il motore M1, gli ingressi A2-B2 comandano il motore M2. Il piedino direction (pin 1) è collegato a +V, mentre il piedino enable (pin 19) va collegato a massa (GND). Nel caso si voglia usare l'integrato 74HC245 come driver per i motori di un walker, bisogna collegare le uscite del MicroCore come indicato nel disegno seguente:
I numeri 1-2-3-4 indicano il numero dei neuroni del MicroCore, mentre le sigle A1-A2-B1-B2 fanno riferimento allo schema di montaggio riportato sopra. NB: Per informazioni più dettagliate si possono consultare i datasheets degli integrati, ad esempio sul sito http://library.solarbotics.net/datasheets/. Per altre informazioni sul pilotaggio dei motori vedi: Ora
si può passare alla realizzazione del telaio e delle zampe del walker. |