|
IL DRIVER MOTORI («PONTE H»)
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Il driver per i motori è un circuito che permette al segnale captato dai sensori di comandare lo stato del motore (avanti - stop - indietro). Viene realizzato con un circuito chiamato «ponte H» di cui qui sotto viene riportato lo schema concettuale (da http://www.acroname.com/robotics/info/articles/drivers/drivers.html):
Più di tante parole, per
capire come funziona un ponte H conviene costruire questo semplice circuito
con quattro interruttori (A, B, C, D), una pila (+ e -) e un motorino
(Load), osservando
cosa succede quando si chiudono i diversi contatti.
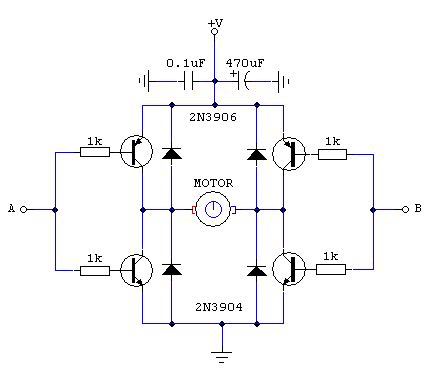
Una volta fatta un po' di pratica con questo circuito, si può montare il circuito seguente che sostituisce gli interruttori manuali con degli interruttori elettronici (= transistor). Provate ad usare 2N3906 per Q1-Q2 (PNP) e 2N3904 per Q3-Q4 (NPN). Le resistenze di base sono da 1K:
Il comportamento di un
ponte H è illustrato nella tabella che segue:
Come si vede, quando A e B sono uguali (entrambi negativi o entrambi positivi), il motore non gira. Per invertire il senso di marcia bisogna invertire i livelli logici di A e B.
NOTA : la condizione 0/0 oppure 1/1 può provocare la distruzione dei transistor! Per questo normalmente si aggiunge un inverter (U1A) tra l'entrata A e B. In questo modo, ai capi del ponte si ottengono sempre due livelli logici opposti:
Se volete
approfondire il discorso e sapete l'inglese, potete consultare questi siti:
Benché si possano
costruire dei circuiti a ponte H con componenti discreti, è molto più comodo
e sicuro utilizzare dei circuiti integrati.
NOTA:
gli integrati MAX626/7/8 sono sostituibili con i MAX4426/7/8. Ecco uno
schema tratto dal sito Robot
Room
ATTENZIONE: vedi la nota su www.robotroom.com/HBridge.html secondo cui questo ponte è adatto a pilotare motori che non assorbano più di 100-150 mA sotto carico.
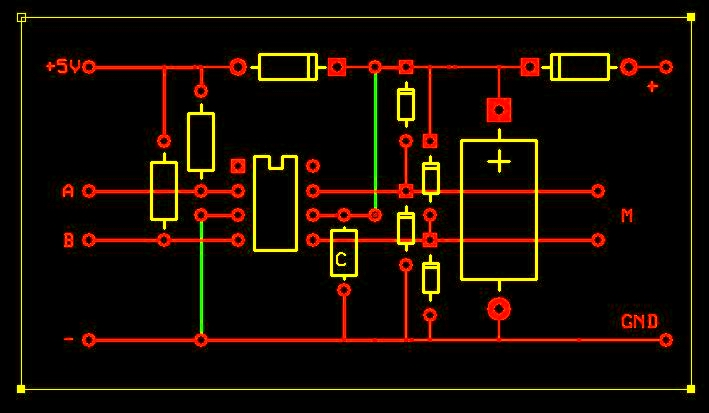
TERMINALE "ENABLE" Il circuito che segue serve per ricavare un terminale ENABLE quando si usano come ponte-H degli integrati tipo MAX626, TC4424 (e simili) che ne sono sprovvisti. Il terminale ENABLE può essere utilizzato per regolare la velocità del motore mediante un segnale PWM (vedi qui).
NOTA: anche se nello schema non compaiono, gli ingressi A e B sono forzati a livello 1 da due resistenze da 10K. Lo schema seguente presenta un ponte H che utilizza l'integrato L293D ed è tratto dal datasheet:
Rispetto a quelli precedenti, questo integrato presenta anche un piedino VINH (inhibit = disabilita). Per abilitare il ponte, collegare i piedini 1 e 9 a +5V. Il modello L293D contiene al suo interno anche i diodi di protezione e non richiede quindi altri componenti aggiuntivi, a parte le capacità di filtro su entrambe le alimentazioni (pin 8 e 16). La velocità dei motori può essere controllata inviando ai terminali enable (1 / 9) degli impulsi a larghezza variabile (PWM). Per altre informazioni sul pilotaggio dei motori vedi: Come si è detto, il motore collegato al ponte H si muove solo se i livelli logici applicati agli ingressi del ponte sono opposti (1/0 - 0/1). Questo permette il controllo della direzione di marcia del minirobot. Se, come avviene di solito, tra i due ingressi del ponte viene collegato un inverter, il motore sarà sempre in moto e cambierà direzione quando cambia il livello logico in entrata. In questo modo avremo un robot che non potrà mai fermarsi, a meno di agire su eventuali ingressi di ENABLE o togliendo l'alimentazione ai motori:
Lo schema seguente mostra un circuito adatto
a pilotare un doppio ponte H. Ai punti IN1 e IN2 vanno collegati i segnali di
ingresso. Le uscite (A1-B1) e (A2-B2) vanno collegate ai rispettivi canali del
ponte H (per maggiori chiarimenti vedi
Se, al contrario, colleghiamo i due ingressi al positivo (attraverso due resistenze di pull-up), avremo un robot che normalmente sarà immobile e si muoverà in una direzione o nell'altra solo quando cambia il livello logico su uno degli ingressi.
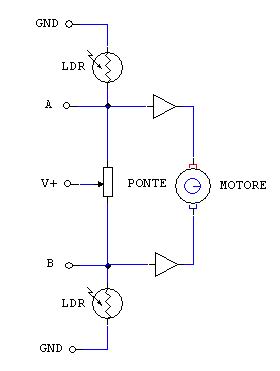
Con questo tipo di ponte e applicando agli ingressi A e B degli elementi fotosensibili (fotoresistenze o fototransistor) si possono costruire dei robot che seguono la luce oppure delle teste fototropiche:
Il trimmer serve per il bilanciamento, cioè per arrestare il motore quando la fonte luminosa è centrata. |
|||||||||||||||||||||||||||||||||||||||||||||||||||||