|
COME INFLUENZARE
LA RETE |
|
Prima di continuare consiglio di leggere l'articolo http://www.solarbotics.net/bftgu/starting_nvnet_influe.html
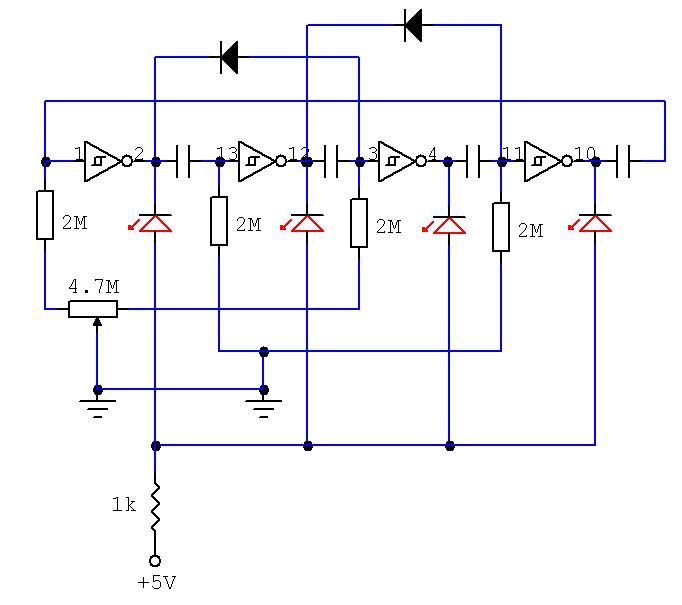
A questo punto conviene apportare una piccola modifica al uCore, inserendo un trimmer da 4,7M. Questo trimmer può essere sostituito da due resistenze fisse da 2-3 MegaOhm:
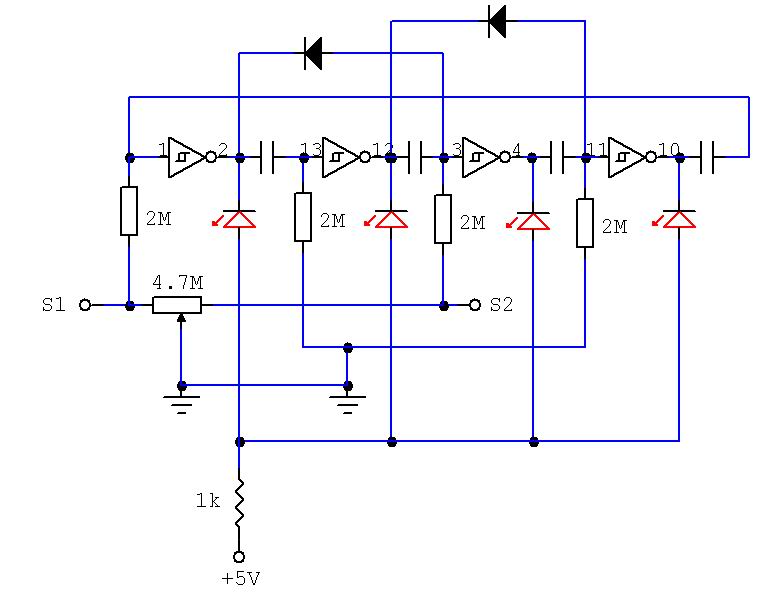
Fatto questo, dobbiamo collegare due fili al primo (S1) e al terzo (S2) neurone, come indicato nello schema seguente. Questi fili ci serviranno per collegare due sensori (S1 e S2) per influenzare il uCore:
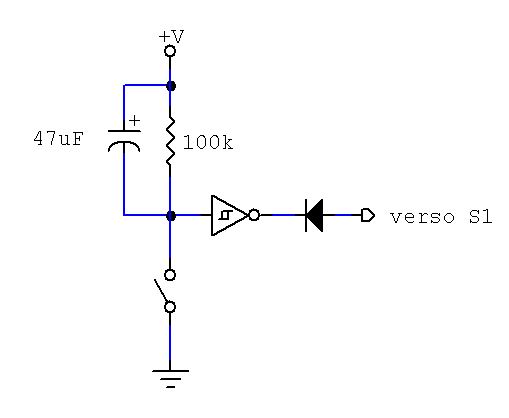
Collegate il sensore come segue, utilizzando i due inverter "avanzati" dal montaggio del uCore (nell'integrato 74HC14 ce ne sono 6). Nello schema il sensore è indicato dal simbolo dell'interruttore:
FUNZIONAMENTO
SENSORI I sensori possono essere di diverso tipo: LDR, IR, fotodiodi, bumpers, ecc. Quello che conta è che ci permettano di influenzare il uCore in base al verificarsi di determinate condizioni ambientali: luce, presenza di ostacoli, ecc. Il sensore più semplice da realizzare è il sensore meccanico di ostacoli (bumper) realizzato con due baffi (whiskers). Questo sensore si può facilmente autocostruire con una corda di chitarra e un contatto di massa recuperato da qualche vecchio stereo, autoradio, o altra apparecchiatura. MONTAGGIO
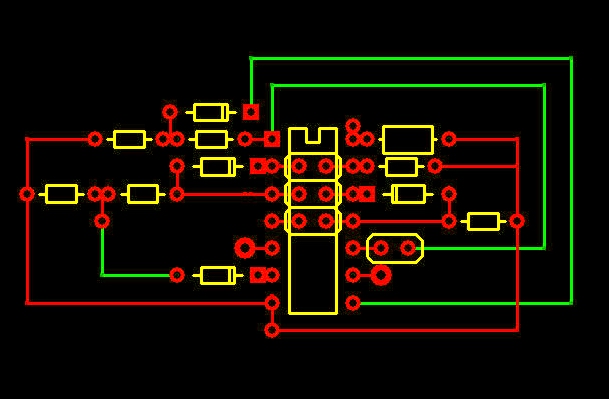
NOTA: il circuito è visto da sopra, lato componenti. Tre condensatori vanno montati sul retro della basetta, lato saldature. Il circuito non fa uso di trimmer, sostituiti da due resistenze fisse. A questo punto abbiamo realizzato quanto segue:
Siccome il uCore non può pilotare
direttamente i motori, occorre collegare le sue uscite a un DRIVER
(o a un ponte H). |