|
|
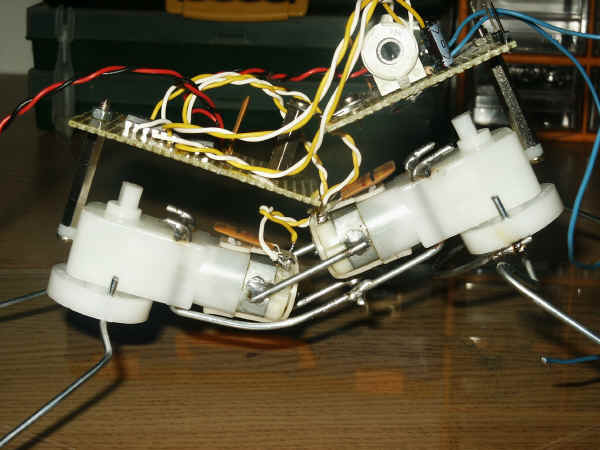
Particolare del
telaio (visto di lato). I motori sono SBGM3 (Gear Motor
3 - Asse a 90°). La struttura e le gambe sono realizzate
con tondino Ø 3mm. Si notano la basetta del MicroCore (a
ds. in alto) e quella del driver (a sn.) |
|
|
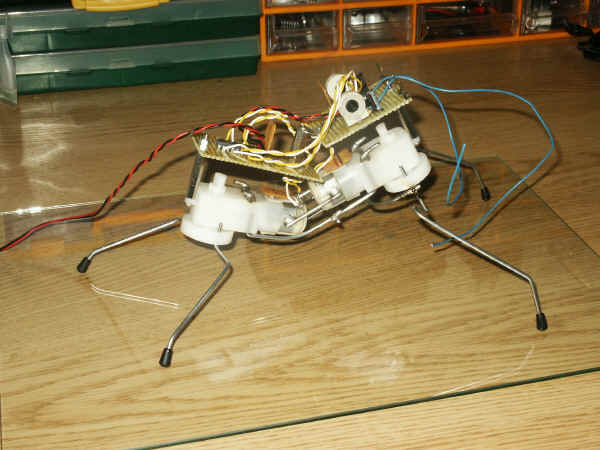
Visione
d'insieme del walker durante il collaudo, senza il
portabatteria. |
|

|
Particolare
delle gambe. Per le saldature usare un saldatore rapido da
100 W, pasta disossidante e stagno di buona qualità. |
|

|
Particolare
delle gambe. I gommini sono stati acquistati presso un
brico-center. |
|
|
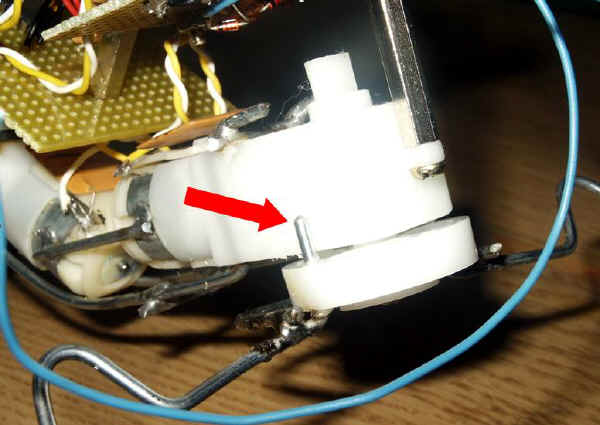
Particolare di
uno dei fermi (indicato dalla freccia rossa) che evitano il
"fuori-corsa" delle gambe. |
|
|
|
|
MICROCORE:
CIRCUITO BASE
MICROCORE:
COME
INFLUENZARE LA RETE.
DRIVER
MOTORI
|
|