|
Pezzi: 461
Larghezza: cm. 11,91
Profondità: cm. 45,94
Altezza: cm. 28,49
Peso (senza batterie): 850 gr.
Peso (con 6 batterie AA): 1010 gr.
Kit: LEGO® Robotics Invention System 2.0
Serie: LEGO® MINDSTORM
Componenti elettrici: n.1 RCX 2.0, n.2 sensori di contatto,
n.2 motori.
Pezzi aggiuntivi:
n.1 motore, n.1 sensore di rotazione,
pezzi lego technic, pezzi lego pneumatic
(Pump small, Cylinder 2 inlet, Pneumatic Switch, Airtank,
Pneumatic tube diam.4mm.),
My ANGLE SENSOR 50Kohm
|
NEW
Visita la nostra pagina su
Brickshelf
 PNEUMO è stato costruito utilizzando il KIT LEGO® Robotics Invention System 2.0 della serie LEGO® MINDSTORM e alcuni pezzi aggiuntivi.
PNEUMO è stato costruito utilizzando il KIT LEGO® Robotics Invention System 2.0 della serie LEGO® MINDSTORM e alcuni pezzi aggiuntivi.
In particolare sono stati utlizzati pezzi Lego Pneumatic.
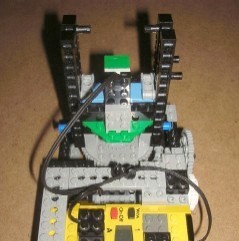
Si tratta di una GRU che preleva un oggetto con la mano pneumatica e lo deposita in una nuova posizione.
Il Robot è composto dal BRICK di controllo RCX 2.0, da una base all'interno della quale è montato il
My ANGLE SENSOR 50Kohm, da un azionamento che contiene la pneumatica e tutti i meccanismi/ingranaggi per il movimento, da un braccio che si alza-abbassa-ruota, e da una mano pneumatica che si apre-chiude per raccogliere l'oggetto.
 RCX 2.0: E' l'unità di controllo (computer) di tutto il Robot che con il programma software gestisce motori, sensori e quindi il completo funzionamento di PNEUMO.
RCX 2.0: E' l'unità di controllo (computer) di tutto il Robot che con il programma software gestisce motori, sensori e quindi il completo funzionamento di PNEUMO.
Per questo progetto è stato utilizzato un software sviluppato con (NQC BricxCC).
BASE: E' la parte che, grazie al motore 1, permette a PNEUMO di ruotare.
Per evitare forzature durante la rotazione del braccio, è stato utilizzato lo speciale ingranaggio 60c01 Technic Gear 24 Tooth Clutch che permette al motore di girare a vuoto quando il braccio arriva a finecorsa.
 MY ANGLE SENSOR 50Kohm:
Il sensore che si trova all'interno della BASE è montato in asse con il braccio rotante della gru e ne rileva la posizione assoluta (il sensore rileva da -135° a +135°, la gru ruota da -75° a +75°).
MY ANGLE SENSOR 50Kohm:
Il sensore che si trova all'interno della BASE è montato in asse con il braccio rotante della gru e ne rileva la posizione assoluta (il sensore rileva da -135° a +135°, la gru ruota da -75° a +75°).
Con opportuni accorgimenti software permette di controllare in modo preciso la rotazione evitando ad esempio di dover utilizzare dei tempi per controllare la rotazione a destra-sinistra.
In particolare è molto utile per conoscere la posizione centrale (o iniziale) e cioè 0°.
AZIONAMENTO: Permette di azionare:
con il motore 2 la pompa pneumatica e lo switch pneumatico.
con il motore 3 il braccio
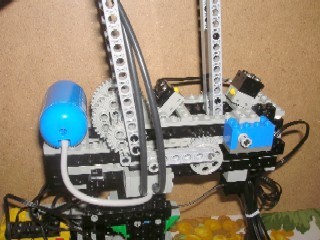
 Il motore 2 pilota sia la pompa pneumatica che lo switch pneumatico, ma con rapporti(velocità) diversi; in questo modo è possibile caricare l'Airtank con la pompa (che gira più velocemente) e successivamente quando lo switch si
porta nella posizione destra o sinistra di azionare con l'aria presente nell'Airtank il pistone pneumatico per aprire-chiudere la mano.
Il motore 2 pilota sia la pompa pneumatica che lo switch pneumatico, ma con rapporti(velocità) diversi; in questo modo è possibile caricare l'Airtank con la pompa (che gira più velocemente) e successivamente quando lo switch si
porta nella posizione destra o sinistra di azionare con l'aria presente nell'Airtank il pistone pneumatico per aprire-chiudere la mano.
Il sensore di rotazione rileva i giri effettuati dal motore 2 e viene utilizzato per conoscere la posizione dello switch pneumatico (il valore dello spostamento può essere modificato via software).
BRACCIO: Il braccio della gru oltre a ruotare, si alza-abbassa grazie al motore 3
(montato sull'azionamento).
 Le posizioni alta e bassa sono controllate con due sensori di contatto collegati in parallelo.
Le posizioni alta e bassa sono controllate con due sensori di contatto collegati in parallelo.
MANO: La mano pneumatica della gru si apre-chiude utilizzando il cilindro pneumatico montato sul braccio.
N.B. è importante analizzare come il software gestisce il funzionamento della gru e la logica pneumatica:
- All'avvio del programma il motore 2 aziona la pompa per caricare di aria l'Airtank.
- Lo switch pneumatico si porta nella posizione di sinistra (mano aperta) e poi torna in posizione centrale.
- Il braccio si abbassa e si posiziona sopra l'oggetto.
- Il motore 2 aziona la pompa e lo switch pneumatico si porta nella posizione di destra (mano chiusa).
- L'oggetto viene raccolto.
- Il braccio si alza, ruota verso la nuova posizione e si abbassa per riposizionare l'oggetto.
- Il motore 2 aziona la pompa e lo switch pneumatico si porta nella posizione di sinistra (mano aperta).
- L'oggetto viene riposizionato.
- Il braccio si alza e ruota verso la posizione centrale - FINE PROGRAMMA.
|



