 Inizio Inizio
|
Tutti gli appunti |
 |
GLI AUTOMI CORSO DI SISTEMI E AUTOMAZIONE PER LA V ITI MECCANICI |
 |
|
|
||

| clic Prima parte |
CONTROLLORI A LOGICA PROGRAMMABILE – PLC
SISTEMI – MODELLI – AUTOMI
|
|
| clic Seconda parte |
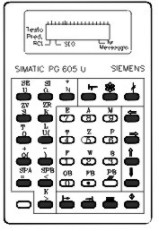
PLC CON TASTIERA PER LISTA DI ISTRUZIONI (SIEMENS)
LINGUAGGIO LADDER PLC FST FESTO
|
|
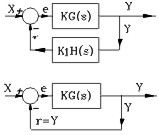
| clic Terza parte | CRITERI DI STABILITŔ DI NYQUIST
SISTEMI DI COMANDO
|
|

| clic Quarta parte | CRITERIO DI BODE CONTROLLI P - PD - PI –PID
STUDIO DELLA STABILITŔ CON RAPPRESENTAZIONE LOGARITMICA
|
|
| clic Quinta parte | MOTORI IN CORRENTE CONTINUA MOTORI BRUSHLESS – MOTORI PASSO PASSO
TRASDUTTORI |
|
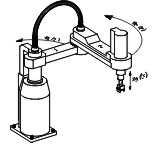
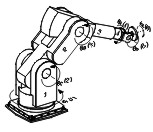
| clic Sesta parte | I ROBOT LA SCIENZA ROBOTICA
OLEODINAMICA PROPORZIONALE |
|
| clic Settima parte | SENSORIALITŔ NEI ROBOT UNITŔ DI CONTROLLO – PROGRAMMAZIONE DEI ROBOT LA FABBRICA AUTOMATICA
ORGANI TERMINALI DEL ROBOT - End effector |
|
|
SERAFO | APPUNTI | FRESCACCE | CENE |