The proposed planner bases itself on the Brooks subsunction model:
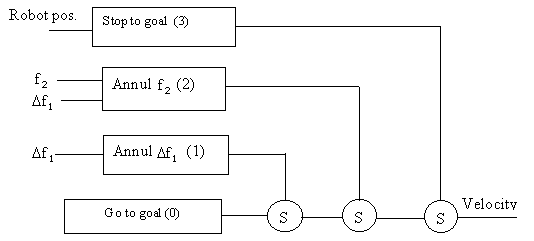
BEHAVIOR 0: GO TO THE GOAL
- The robot goes to the goal with normal velocity (the robot can go from
a min to a max velocity, where normal is an intermediary value). If the actual
velocity is different from the normal, the robot adjust velocity to carry
it to that value.
BEHAVIOR 1: ANNULS VARIATIONS OF FORCE 1
- The robot goes to the goal with a velocity that is:
- decreased, if the variation increases
- increases, if the variation decreased
This behavior has derived just from the human one; in fact, if the strength
that a person applies decreases, then is probable that his speed is inferior
to those of the others, therefore he needs increase the speed for be able
to engrave more strength.
To the contrary, if she force increases, then the person is going too strong
as regards the others, or there has been a collision with an object, therefore
the strategy is however of decrease the speed so that give way to all of
participate actively.
BEHAVIOR 2: ANNULS FORCE 2
- The robots goes to the goal with a velocity that is:
- decreased, if he must cross more road respect to a hypothetical robot
that is situated from the opposite part to the center of the bar
- increased, in the other case
Before analyze how this behavior work, we look for the type of information
a robot need to know to calculate the correct situation. At the moment that
the robot comes programmed, he must know the following data:
- his initial position (x, y, theta)
- his final position (x, y, theta)
- that theta orientation angle (respect an absolute cartesian reference)
is the same of the bar
- from that part is attached to the bar as regards his center
- that there is at least a robot set from the other departs of the center
of the bar
The purpose of this behavior is to make a rotation to the bar. In fact,
if the robots that must complete more road for reach the goal increase the
speed, while the others decreases it, the bar will extend to rotate, doing
therefore annul the strength on the sensor 2. Since this rotation is not
instant, this behavior could stay active for much, and even, the strength
that perceives the sensor will also increase when the bar has begun to rotate,
for then decrease subsequently. For this reason, it's schedule that when
this behavior is activated, a contribution of the behavior 1 type is added
to avoid non cooperative robot motion.
If we analyze the human behavior, we look that in this case he annuls this
force moving parallel of the bar. This behavior has not been reproduced,
in as, with that proposed it's been limited of intention the degree of possible
movement for the robot (the robot only rotate on if self, and goes straight
for the new direction).
We think that using the human behavior it be possible to make the system
more efficient.
BEHAVIOR 3: STOP TO GOAL
- If the robots is arrived to the goal, it stops. Since the orientation
with which it arrives could be different from the wanted one, the robot wheel
slowly verse the his correct orientation
|




