|
|
|
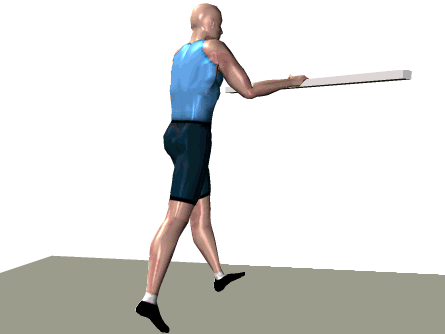
In the above image there's a representation of the mobile robots
used for the task. It's composed by a mobile base with 3 degrees of effected
liberty, and from a platform container the arm of the robot that has 3 degrees
of liberty not effected.
In the follower the perpendicular element to the bar will have identified like the first, while the second will be the attached one to the flowing guide. As you could see, it is scheduled a rigid support that supports the weight of the bar in way to don't provoke efforts to the first yelding element. At the end of this support there's a counterweight for give stability to the robot. Besides, for guarantee that there are not damages in the mechanism, the robot could unhook the pliers with which it is attached to the bar if the strength in play has climbed beyond to the limit of established operation. Since we are using a multi-robot system, this eventuality doesn't jeopardize the prosecution of the task. This structure of the robot wants to get the type of information that are revealed in a person that is using a bar, like:
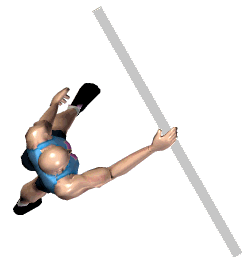
In above picture is represented only one people that pushed the
bar, but you must image that there are many people along the bar. FIRST:
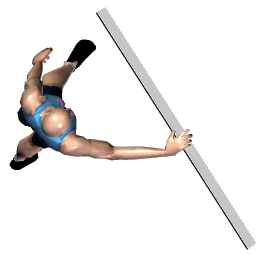
In this case the person is pushing the bar just where the bar is going for action of the other people. We will se in next paragraph that, from the variation of force that the muscles of the arms effect due to the action of push of the legs, the people choose it's correct behavior. SECOND:
In this case the people isn't doing a cooperative task with the
other people, because its body is more shifted from the pushing point (there's
a side force), so the strategy may change. |

|
Università degli studi di Padova/Ladseb CNR di Padova |