|
Prima di tutto
procuratevi il materiale per realizzare il telaio. Nell'esempio è
stato utilizzato un foglio di PVC espanso di 300 x 300 x 3 mm che è costato
ca. 2 Euro, ma potete anche usare legno, plexiglass, compensato, ecc. |
 |
Disponete sul vostro
foglio le due ruote e i motori per vedere quanto spazio occupano.
Tenete conto anche del posto occupato dal portapile e dalla ruota
pivottante. Nell'esempio il portapile verrà posizionato sotto
al minirobot. |
 |
Segnate con un
pennarello i vertici del vostro telaio.
Con una squadra
tracciate le linee lungo le quali dovrete ritagliare il telaio. |
 |
 Con
un seghetto o un taglierino tagliate la porzione di materiale che
vi serve per il telaio. Mettete sotto al materiale da tagliare del
cartone o dei giornali vecchi per evitare di danneggiare il
tavolo. Con
un seghetto o un taglierino tagliate la porzione di materiale che
vi serve per il telaio. Mettete sotto al materiale da tagliare del
cartone o dei giornali vecchi per evitare di danneggiare il
tavolo. |
 |
Con un pennarello
segnate sul telaio lo spazio da ritagliare per le ruote.
Nell'esempio sono state usate due ruote MECCANO che hanno un
diametro di 7 cm e un battistrada di 2,7 cm. Il taglio da
praticare misura quindi 8 x 3 cm. |
 |
Con
un seghetto o un taglierino tagliate la porzione di materiale in
eccesso. Mettete sotto al materiale da tagliare del cartone o dei
giornali vecchi per evitare di danneggiare il tavolo. |
 |
|
 |
Saldate
sui contatti di ciascun motore un condensatore da 100 nF (0.1 mF)
e due fili lunghi ca. 25 cm. |
 |
F |
 |
|
 |
|
 |
Per fissare la
scheda dei componenti elettronici utilizzate dei distanziatori
esagonali (quello nella foto è alto 1 cm) |
|

|
| Il telaio
completato con una basetta millefori da 16 x 10 cm |
|

|
|
Il MiniRobot con la scheda di controllo
dei motori |

|
|
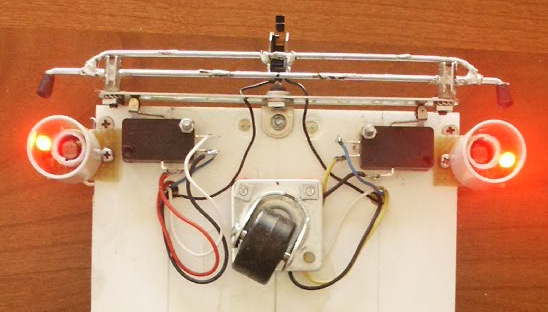
Il Minirobot con i sensori di
contatto (bumpers) |