|
I sensori sono la parte
più importante di un robot, perché gli permettono di interagire con
l'ambiente in cui si trova. Attraverso i sensori il robot vede, sente, si
accorge degli ostacoli e reagisce di conseguenza. I sensori più semplici
sono i sensori di contatto che, come dice la parola, si attivano quando il
robot entra in collisione con muri, oggetti sparsi sul suo cammino,
persone, ecc.
Per realizzare i
sensori di contatto ("bumper") per il vostro MiniRobot vi occorrono i seguenti
materiali:
-
un pezzo di plastica,
di lamierino o di legno lungo come il frontale del robot
-
una squadretta a L
-
un bullone lungo 5 mm
con il suo dado
-
una rondella dentata
-
un bullone lungo 12
mm
-
diverse rondelle
semplici
-
un dado autoserrante
-
lubrificante
-
due microswitch
("fine corsa")
-
filo
-
tondino Ø 3mm
-
due capicorda
-
Cominciate a fissare
la squadretta al centro del bumper, serrandola con il bulloncino da
5mm, la rondella dentata e il dado.
-
Fate un buco al
centro della parte frontale del telaio
-
Fissate l'estremità
libera della squadretta al telaio, usando il bullone da 12 mm e il
dado autoserrante. Usate due rondelle, sia dalla parte della
squadretta, sia dalla parte del dado autoserrante.
-
Stringete il dado
autoserrante quel tanto che basta per dare stabilità al
bumper, lasciando libera la squadretta di muoversi sull'asse
del bullone.
-
Controllate che il
bumper si muova liberamente senza urtare contro il telaio.
-
Posizionate i due
switch in modo che il bumper sia mantenuto ben fermo in posizione e
fissateli).
-
Una volta asciugata
la colla, pigiate e rilasciate il bumper e controllate che gli switch
lo riportino in posizione di riposo. In caso contrario, allentate un
po' il dado autoserrante.
-
Applicate qualche
goccia di lubrificante sui giunti.
-
Saldate due fili su
ciascuno switch, sui contatti normalmente aperto (indicato con
la sigla NA o NO) e comune (C).
-
I fili di ciascuno
switch vanno saldati uno al negativo e l'altro all'ingresso
del circuito di comando dei motori (vedi schema).
Ricordatevi che il bumper sinistro va
collegato al motore destro e viceversa.
ATTENZIONE: prima
di fissare la ruota pivottante, leggere la NOTA
 |
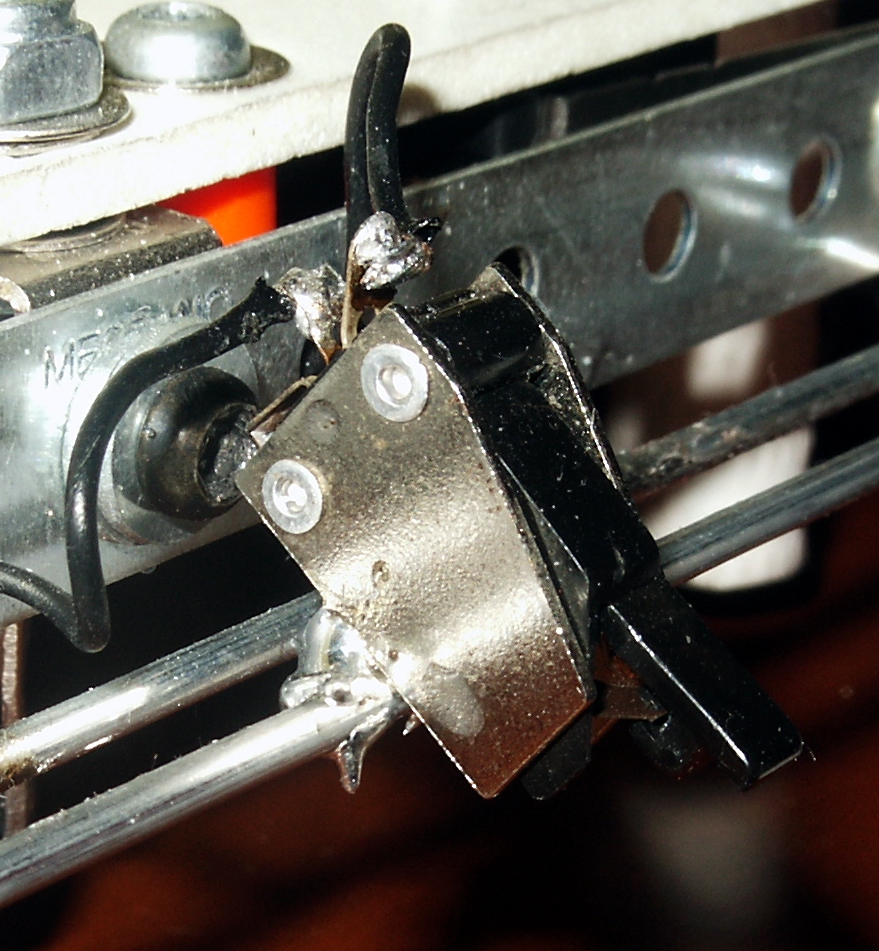
Vista frontale del
bumper, realizzato con un pezzo del Meccano, fissato al telaio del
MiniRobot con una squadretta a L. |
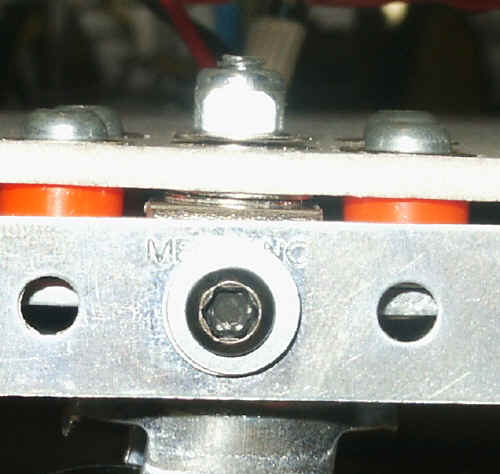 |
Particolare del
fissaggio della squadretta. Si nota in alto il dado autoserrante. |
 |
Il bumper visto da
sotto. Il fissaggio al telaio non è visibile, perché il bullone è
dietro la ruota pivottante. |
 |
Altro particolare del
bumper: la squadretta a L è libera di muoversi perché la ruota
pivottante è distanziata dal telaio. |
 |
Vista laterale da
sotto: si vede il bumper, la squadretta a L, la
ruota pivottante rialzata dal telaio con dei distanziatori di plastica. |
 |
Particolare del
fissaggio al telaio. |
 |
Vista frontale del
robot. Si vedono: la ruota pivottante, il bumper, il telaio. |
 |
I due switch
"finecorsa" che hanno la funzione di mantenere il bumper
in posizione e di rilevare l'urto contro l'ostacolo. |
 |
Per distanziare il bumper
dal telaio è stato
aggiunto un paraurti realizzato con tondino da 3mm. |
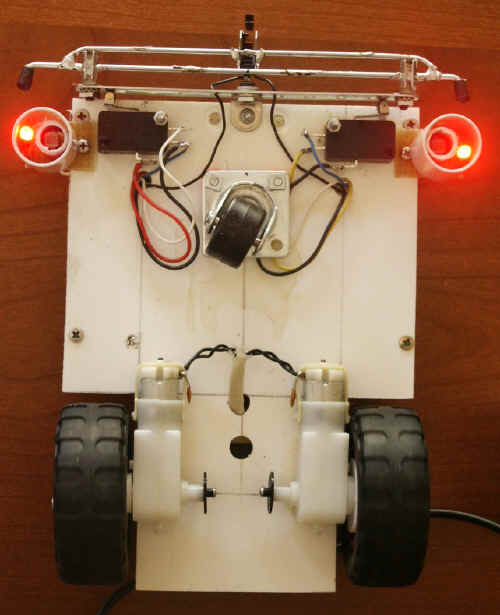 |
Il
robot finito visto da sotto. Si vedono (dall'alto):
- il bumper centrale,
- i due finecorsa,
- la ruota pivottante,
- i motori
NOTA: in alcuni casi può essere
utile fissare la ruota pivottante un po' indietro (vedi foto) per non interferire con il movimento del bumper.
Nella foto si vedono anche due
sensori di superficie realizzati con diodi LED rossi ad alta
luminosità e fotoresistenze |
| |
|
NOTA 1: GLI INTERRUTTORI FINE CORSA
- gli interruttori fine-corsa presentano
3 contatti: NO (normalmente aperto), C (comune) e NC
(normalmente chiuso.
- gli interruttori fine-corsa vanno collegati tra il negativo di alimentazione e
l'ingresso COMANDO del relè utilizzando il contatto COMUNE
(C) e NORMALMENTE APERTO (NO)
NOTA 2: LA NAVIGAZIONE
- il sensore sinistro va
collegato all'ingresso COMANDO del motore destro
- il sensore destro va collegato
all'ingresso COMANDO del motore sinistro
In questo modo
il vostro MiniRobot funziona come un rover, cioè si
allontana dagli ostacoli contro cui va a sbattere.
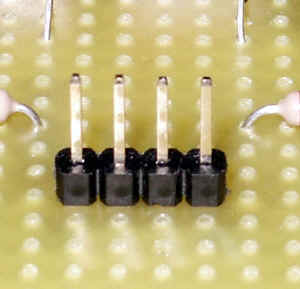 |
Per il collegamento
dei sensori alla scheda è stata utilizzata una "strip"
di contatti: i due centrali vanno collegati al negativo, i due
esterni agli ingressi del circuito di
controllo. |
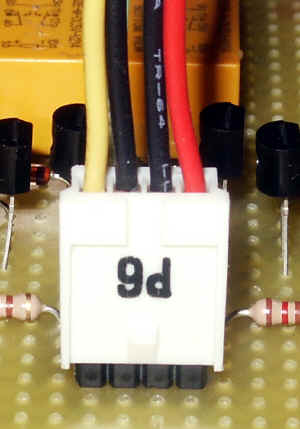 |
Un connettore
recuperato da un computer permette di collegare il bumper alla
scheda. |
COME AGGIUNGERE UN
SENSORE FRONTALE Nelle
foto che seguono si vede un sensore frontale che è stato aggiunto al
robot per intercettare gli ostacoli centrali:
Il sensore è stato
realizzato con un interruttore fine-corsa recuperato da un vecchio
giradischi (scattava quando il braccetto arrivava alla fine del disco:
parliamo di vinile!). Per
il collegamento, basta collegare il finecorsa (terminali C e NO)
tra il negativo di alimentazione ed entrambi gli ingressi COMANDO
(destro e sinistro),
mettendo in serie due diodi al silicio (tipo 1N4007 o simili).
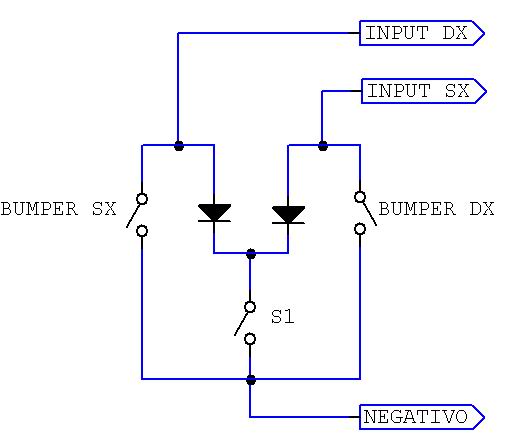
Nello schema S1
indica il sensore centrale. Se tutto funziona, azionando il sensore
centrale il robot deve andare in retromarcia.
|