|
|
|||||||||||||||||||||||||||||||
| MACCHINE FOTOTROPICHE | |||||||||||||||||||||||||||||||
| | FOTOTROPISMO | EFFETTO FOTOVOLTAICO | MACCHINE FOTOTROPICHE | PROGETTO | | |||||||||||||||||||||||||||||||
|
Il fototropismo è la proprietà di alcuni esseri viventi di orientarsi verso la luce o verso il buio. Nel primo caso si parla di fototropismo positivo, nel secondo di fototropismo negativo. Nel mondo vegetale il fenomeno avviene per effetto di un fitormone (auxina) che si trova nell'apice del germoglio. Questo ormone regola l'allungamento delle cellule. L'auxina prodotta nell'apice si concentra maggiormente nella parte in ombra del gambo e in grado minore nella parte colpita dalla luce. In questo modo le cellule in ombra saranno più allungate rispetto a quelle esposte alla luce. Questo provoca l'orientamento del gambo verso la luce
Nel mondo animale
esempi tipici di tropismo sono le blatte (fototropismo negativo) e le falene (fototropismo positivo).
EFFETTO FOTOVOLTAICO: UN PO' DI STORIA
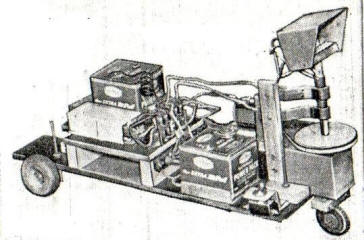
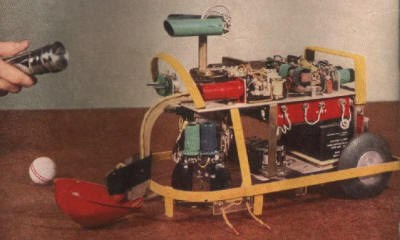
Data la disponibilità commerciale di cellule fotovoltaiche al selenio, non stupisce che molti dei primi robot fossero macchine fototropiche:
NOTA: alcuni di questi robot fototropici montavano un unico sensore di luce, sistemato su una torretta girevole collegata al motore delllo sterzo. Le ruote posteriori erano fisse e servivano unicamente per la trazione. La torretta (e la fotocellula, solidale con essa) aveva una rotazione di 360° e si fermava quando intercettava la luce. In questo modo il robot puntava sempre nella direzione della luce. Nella tartaruga di Grey Walter il motore di trazione era sistemato nella forcella della ruota sterzante e le ruote posteriori servivano solo come appoggio.
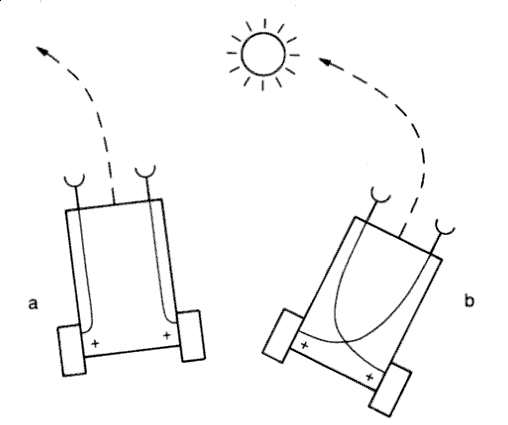
Nel mondo della robotica BEAM il robot fototropico è conosciuto come Photovore (fotòvoro, cioè "mangia-luce"). Il fototropismo («tendenza a dirigersi verso la luce») del Photovore dipende dalla sua struttura simmetrica, costituita da due identici motori solari ("SOLARENGINE"). Quando un motore solare riceve più luce, gira più velocemente e il Photovore si orienta verso la fonte luminosa. Un tutorial per costruire un Photovore BEAM lo potete trovare qui.
Per fare in modo che il fototropismo sia positivo, il sensore destro deve controllare il motore sinistro e viceversa. In caso contrario la macchina avrà un comportamento fotofobico, cioè fuggirà la luce e cercherà il buio.
Il funzionamento è semplice: la fotoresistenza (LDR) e il trimmer da 10k costituiscono un partitore resistivo che determina il punto di conduzione del transistor NPN (BC547). Quando la luce colpisce la LDR il transistor BC547 conduce e la base del secondo transistor (un PNP tipo BC557) viene collegata alla massa negativa tramite la resistenza da 100 Ohm. Il transistor entra in conduzione, lasciando passare la tensione positiva verso il motore che di conseguenza si mette in moto. La macchina è composta da due di questi circuiti, uno per ogni motore. Nella figura qui sotto trovate lo schema di montaggio, facilmente realizzabile su basetta millefori o breadboard:
PROGETTO DI MACCHINA FOTOTROPICA
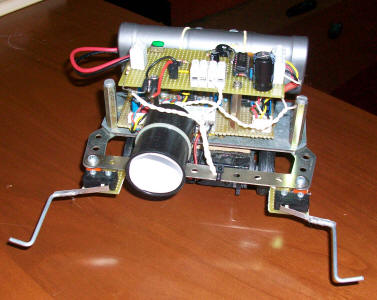
La macchina è un "ibrido" tra il sistema a torretta girevole e quello a sterzo differenziale: le ruote sono montate su due motori indipendenti comandati da un ponte H e possono girare in avanti o indietro, mentre il sensore di luminosità è unico e costituito da una LDR (fotoresistenza). L'arresto della macchina è ottenuto con dei sensori di contatto.
Attraverso un trimmer resistivo è possibile tarare la sensibilità del sensore luminoso. Una sensibilità troppo elevata (resistenza trimmer = 10k) ci obbliga ad usare la macchina in un ambiente buio (o comunque a bassa luminosità) per evitare interferenze dovute alla luce ambientale. Con una sensibilità bassa (resistenza trimmer = 1k) bisogna usare come bersaglio una fonte luminosa molto potente, in grado di superare il livello della luce-ambiente.
La macchina gira su se stessa finché non intercetta una fonte luminosa di intensità adeguata. In questo caso si dirige verso la luce e si ferma quando vengono attivati i sensori di contatto.
MACCHINA FOTOTROPICA 2: in una seconda versione sono state apportate alcune modifiche:
SCHEMA
|
|||||||||||||||||||||||||||||||
| | FOTOTROPISMO | EFFETTO FOTOVOLTAICO | MACCHINE FOTOTROPICHE | PROGETTO | | |||||||||||||||||||||||||||||||

![[falena+sfinge.jpg]](falena+sfinge.jpg)










{kind=link}
{kind=link}
{kind=link}
{kind=link}