|
COM'È FATTO UN
MINIROBOT? |
||||||||||
|
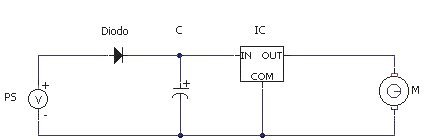
PHOTOVORES: sono robot fototropici, basati sul motore solare («Solarengine»). Si muovono a scatti dirigendosi verso la fonte luminosa. Il Motore Solare (Solar Engine, SE) è il cuore di tutti i circuiti BEAM e serve a trasformare l'energia solare in picchi di tensione che alimentano i motori. Una caratteristica dei motori solari è di non richiedere pile o accumulatori, perché si alimentano direttamente trasformando l'energia solare in elettricità. Ecco lo schema di principio:
La frequenza dei cicli di carica e scarica del condensatore
dipende dall'intensità luminosa. In condizione di
alta luminosità il pannello solare produce molta tensione e il condensatore
si carica molto velocemente. Questo produce una maggiore velocità
del motore. Al contrario, quando la luminosità è scarsa, il condensatore
impiega più tempo a caricarsi e il motore gira più lentamente.
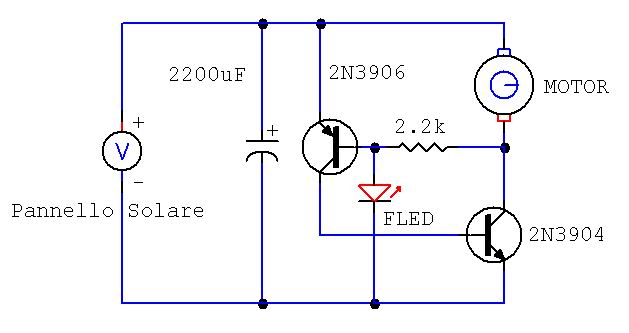
Il FLED Solarengine è un motore solare che usa come interruttore elettronico un LED lampeggiante ("Flashing LED" = FLED). Il FLED conduce a un valore di circa 2,2V mandando in conduzione il transistor PNP (2N3906) il quale a sua volta manda in conduzione il transistor NPN (2N3904), facendo girare il motore. Quando la tensione ai capi del FLED si abbassa, i transistor non conducono e il motore si ferma. Il ritmo di carica-scarica dipende dalla capacità del condensatore elettrolitico: un condensatore di 1000 mF fornisce impulsi brevi e veloci, mentre uno da 4700 mF dà impulsi più lunghi ma distanziati nel tempo, perché il pannello solare impiega più tempo a caricare il condensatore. NOTA: il FLED conduce quando la tensione ai capi del condensatore raggiunge il valore di ca. 2,8V perché bisogna calcolare la caduta di tensione di 0,6V sulla giunzione EB del transistor PNP (2,8 - 0,6 = 2,2).
Con due SE si può costruire un Photovore («mangia-luce»), cioè un robottino che zampetta o striscia verso la luce. Una gran quantità di schemi si può trovare su internet (vedi "Photovore" o "Photopopper").
LINE
FOLLOWERS: compiono un percorso seguendo una linea disegnata sul
pavimento. Sono dotati di uno o più sensori che misurano la differenza di
luminosità tra il pavimento e la linea. Il dato raccolto dai sensori
controlla i motori (destro e sinistro) in modo da mantenere il robot "in
equilibrio" sulla linea. SUMO: "combattono" tra loro cercando di buttare l'avversario fuori da un cerchio disegnato sul pavimento (come nel famoso sport giapponese). Sono dotati di sensori posteriori, simili a quelli dei "line followers", per riconoscere la linea che segna il perimetro del campo da gioco e di sensori di prossimità per intercettare e "aggredire" l'avversario. MAZE SOLVING: compiono un percorso districandosi in un vero e proprio labirinto (in inglese "maze") di ostacoli e difficoltà varie. Sono dotati di sensori di prossimità e di altri sensori (temperatura, luminosità, inclinazione, ecc.), secondo le difficoltà che devono superare. "TESTE" FOTOTROPICHE: sono robot che ruotano sul proprio asse rivolgendosi verso una fonte luminosa. Possono essere modificati per rivolgersi verso una fonte sonora (ad es. una persona che parla). Una categoria a parte è rappresentata dai robot A microprocessore che possono essere programmati per eseguire determinate istruzioni. |
||||||||||
|
|
||||||||||