|
AKADO 1 |
|
AKADO nasce
originariamente come una macchina con l'horror vacui (= paura del vuoto), ma si può facilmente
modificare
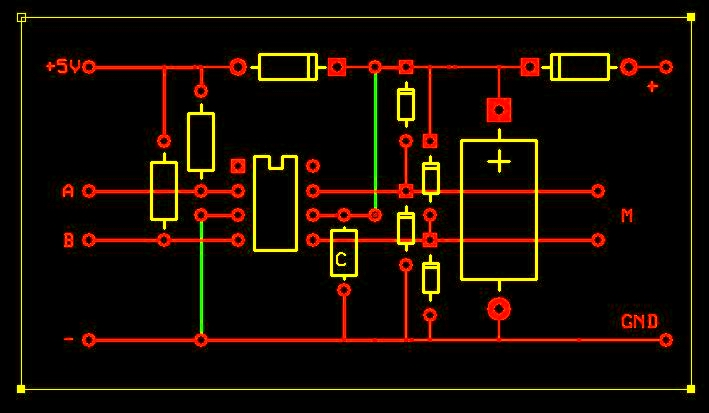
per diventare un line-following. IL CIRCUITO Lo schema mostra una delle due metà di cui è composto il robot.
NB:
se non riuscite a reperire l'integrato MAX4426 (vedi Akado dispone di due sensori ottici a riflessione (Vishay Telefunken TCRT 1000) puntati verso la base del tavolo (in alternativa si possono usare LED e fototransistor combinati. I LED sono alimentati in continua. NOTA: il valore della resistenza di emittore (100k) è indicativo e dipende dalla luminosità dell'ambiente e della superficie riflettente (es. tavolo) su cui il robot deve muoversi. Conviene sostituirla con un trimmer di uguale valore.
Per tarare il trimmer seguire questa procedura:
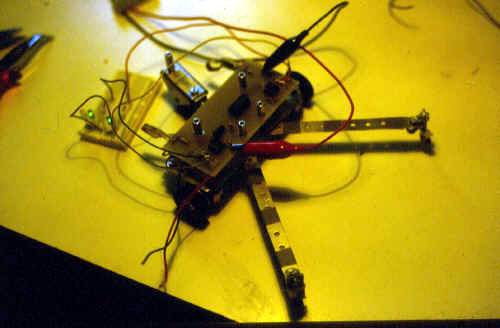
SCHEMA DI MONTAGGIO
Il robot monta due servomotori per modellismo
modificati
COLLAUDO Mettere Akado sul tavolo e osservare come si comporta quando uno dei due sensori sporge oltre il bordo. In alcuni casi entrambi i sensori sporgono contemporaneamente dal tavolo e il robot va in stallo. Provare a mettere Akado su varie superfici e osservare come si mantiene in equilibrio senza cadere. NOTA: è importante che le ruote di AKADO siano posizionate quanto più possibile all'interno e lontane dai bordi esterni del robot. Al contrario, i sensori devono essere montati all'esterno del corpo del robot, per poter intercettare il precipizio da una distanza di sicurezza.
MODIFICHE 1. Se non si vuole che AKADO continui a costeggiare il bordo del tavolo, ma abbia un'andatura più "random", si può collegare tra il primo e il secondo inverter (punto A dello schema) un multivibratore monostabile per allungare la sterzata di qualche secondo:
2. Per trasformare AKADO in un robot line-following, in grado di seguire una linea bianca su fondo scuro, basta sistemare i sensori a cavallo della linea bianca. Per quanto funzioni abbastanza bene, come line-following AKADO necessita di qualche miglioramento. Infatti tende ad andare in stallo quando deve affrontare curve a 90°. |