|
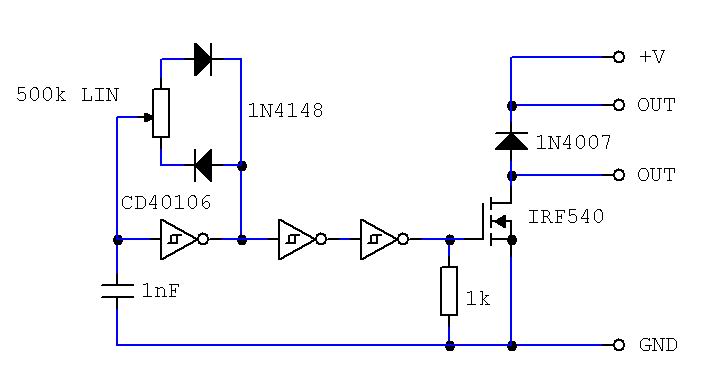
Ruotando il potenziometro lineare da 500K possiamo variare il duty
cycle dell'onda quadra da 0 al 100%. Al massimo duty cycle è
presente in uscita quasi tutta la tensione di alimentazione (vanno
calcolate le perdite dovute alla resistenza Drain - Source del
MOSFET). La tensione di alimentazione del circuito
(+V) dovrebbe quindi essere uguale alla tensione di lavoro dell'utilizzatore. Si tenga comunque presente che la tensione
massima di alimentazione degli integrati CMOS è di 15V.
Per filtrare
l'alimentazione è importante collegare un condensatore poliestere
da 100nF tra i piedini 7/14 dell'integrato e un condensatore
elettrolitico da 470 mF - 63V sui terminali +V e GND del
circuito.
 NOTA:
alle minime velocità può capitare che
il motore emetta dei sibili. Questo è dovuto al fatto che
l'avvolgimento del motore, attraversato dal segnale
dell'oscillatore, si comporta come un trasduttore acustico.
Per ovviare a questo inconveniente basta elevare la frequenza
dell'oscillatore sino alle frequenze ultrasoniche (>20KHz), sostituendo il
trimmer da 500k con uno da 100k oppure riducendo il valore del
condensatore. NOTA:
alle minime velocità può capitare che
il motore emetta dei sibili. Questo è dovuto al fatto che
l'avvolgimento del motore, attraversato dal segnale
dell'oscillatore, si comporta come un trasduttore acustico.
Per ovviare a questo inconveniente basta elevare la frequenza
dell'oscillatore sino alle frequenze ultrasoniche (>20KHz), sostituendo il
trimmer da 500k con uno da 100k oppure riducendo il valore del
condensatore.
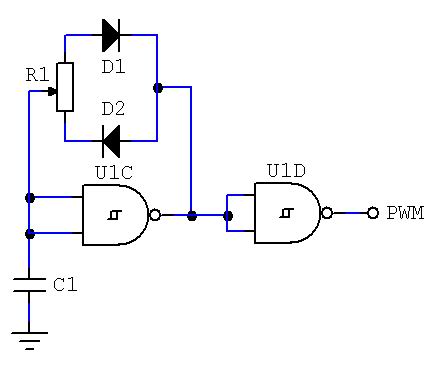
Ecco le frequenze misurate
con alimentazione 5V e potenziometro a metà corsa:
|
POTENZIOMETRO |
CONDENSATORE |
FREQUENZA |
|
500K |
1nF |
~
6300 Hz |
|
100K |
1nF |
~
28 KHz |
|
500K |
100pF |
~
63 KHz |
|
100K |
100pF |
~
240 KHz |
Il circuito non è predisposto per l'inversione di marcia del motore.
Per questo scopo è possibile usare un doppio commutatore (2 vie - 2
posizioni) collegato secondo lo schema.
Lo stesso circuito può essere
sostituito da un relè a due scambi (S1a - S1b) comandato da un transistor.
|