
Il GPS, acronimo di Global Positioning System, č un sistema di navigazione basato sull'impiego di satelliti artificiali che sta viavia sostituendo i vecchi sistemi di navigazione radio come il Tacan.
Il GPS č in gradi di fornire a qualunque utente con qualunque mezzo di trasporto, la sua esatta posizione sul pianeta descritta nella tre dimensioni (latitudine, longitudine e quota sul livello del mare).
Questo sistema si compone di tre componeneti principali: segmento spaziale, segmento di controllo e il segmento di impiego.
IL SEGMENTO SPAZIALE
Il segmento spaziale č costituito da una costellazione di satelliti che ruotano in orbita intorno alla terra, assicurando la copertura globale.
Tale costellazione comprende 21 satelliti di cui 18 con funzioni primarie i rimanenti 3 con funzioni di riserva.
Questi satelliti operano su 6 orbite circolari inclinate di 55° rispetto all'equatore(tre satelliti per ogni orbita con una distanza angolare di 120° l'uno dall'altro); questi satelliti si trovano a circa 20000 Km di quota con un periodo di rivoluzione di 12 ore.
La configurazione del sistema č posta in manirea tale che almeno quattro satelliti siano visibili e quindi a disposizione degli utenti in qualsiasi punto del pianeta.
Durante il normale funzionamento, i satelliti trasmettono all'utente le informazioni relative alla posizione del satellite stesso e al tempo stesso, trasmettono il loro identificativo e il loro stato di efficienza.
Tale trasmissione avviene su due frequenze differenti: L1: 1575.42 MHz ed L2:1227.6 MHz; queste frequenze contengono entrambe il codice "P"(di precisione) e solo la L1 contiene il codice "C/A", che č piů semplice del precedente.
Mediante questi due importanti codici, si usufruisce dei due servizi messi a disposizione dal GPS:
IL SEGMENTO DI CONTROLLO
Il segmento di controllo č formato da 5 stazioni situate in diversi punti sul pianeta piů una principale(Master Control Station) situata in Colorado Spring negli USA.
Il compito di detto componente di sistema č quello di controllare il corretto funzionamento del sistema, ricalcolare in continuazione le informazioni trasmesse da ciascun satellite, aggiornare il messaggio di navigazione, etc.
- Con il codice "P"(Precision), si accede al servizio PPS(Precise Positioning Service) riservato per lo piů a impiegi militari;
- Con il codice "C/A"(Coarse Acquisition, acquisizione grossolana) si accede al servizio SPS(Standard Positioning Service), destinato solamente ad un uso civile.
La differenza tra questi due servizi, sta nella precisione che essi possono offrire; con il servizio PPS si puň avere una precisione di circa 15 metri, mentre con il servizio SPS, si puň avere una precisione di 100 metri; se facciamo un paragone con un altro sistema di navigazione come la piů comune piattaforma inerziale noteremo che la precisione offerta da quest'ultima, 800 m, č di gran lunga inferiore a quella offerta da GPS.

IL SEGMENTO DI IMPIEGO
Il segmento di impiego č formato dall'insieme di utenti che fanno uso del GPS, e possono essere navi , aerei, automobili, camion, e addirittura il singolo soldato.
I ricevitori GPS(gli apparecchi montati sulle automobili o sugli aeroplani), si possono classificare in base al numero di satelliti dai quali possono ricevere informazioni:
- Sistemi ad un canale, detti a bassa dinamica, adatto ai veicoli terrestri
- Sistemi a due canali, detti a media dinamica, adatti ad elicotteri e ai veicoli da trasporto commerciali
- Sistemi a cinque canali, ad alta dinamica, adatti ai veicoli da combattimento ad alte prestazioni
Il tempo impiegato per ricevere il segnale, č detto tempo di reazione che logicamente č minimo nei ricevitori a cinque canali.
IL PRINCIPIO DI FUNZIONAMENTO
Ora che abbiamo descritto che cos'č il GPS, č ora di introdurre il suo principio di funzionamento; questo si basa sulla misurazione della distanza tra l'utente e un certo numero di satelliti stabiliti.
Qundi per misurare la nostra posizione sul globo terrestre, bisogna prima misurare la distanza tra noi e tre satelliti, di posizione nota:
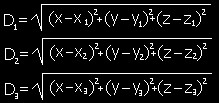
dove x1,x2,x3,y1,y2,y3,z1,z2,z3 rappresentano le coordinate dei satelliti che questi trasmettono con le effemeridi(le equazioni del moto del satellite che consentono di calcolarne la posizione);x,y,z ono le nostre coordinate relative alla nostra posizione, e D1,D2,D3, sono le distaze tra noi e i tre satelliti.
La prima cosa da fare č calcolare il valore delle distanze facendo riferimento alla formula inversa della velocitŕ:
Dove D č la distanza dal satellite, V č la velocitŕ con la quale si propagano le onde elettromagnetiche nello spazio che č pari alla velocitŕ della luce(300000 Km/s) e dT č l'intervallo di tempo che impiega il segnale a giungere all'utente.
Conoscendo V, č di vitale importanza calcolare dT: sia il ricevitore che il satellite trasmettono uno stesso segnale quando esso giunge al ricevitore, questo elettronicamente elabora l'intervallo di tempo e poi lo moltiplica per la velcitŕ della luce, trovando cosě la distanza.
Tale operazione va ripetuta per i tre satelliti. Mediante i segnali ricevuti dal satellite che contengono informazioni circa la sua posizione(x1,y1,z1, etc.), inserisco questi valori nelle tre equazioni inserendo anche le distanze e calcolo la mia posizione(x,y,z).
Logicamente č necessario che tale operazione va ripetuta continuamente per ottenere la mia posizione istante dopo istante.
Purtroppo non č tutto cosě preciso, poichč intercorrono come sempre delgli errori dovuti a:
-L'elaborazione dell'intervallo di tempo;
-Errore nelle effemeridi;
-Errori del ricevitore;
-Propagazione atmosferica;
Per elaborare l'intervallo di tempo in maniera precisa, č necessario disporre di un orologio atomico o comunque sia dotato di un'incredibile precisione, ma questo puň essere installato solamente sul satellite, poichč data la sua dimensione e soprattutto dato il suo costo, renderebbe l'utilizzo di un ricevitore GPS solo ad una ristrettisima cerchia di persone. Per ovviare a ciň sui ricevitori viene installato un orologio poco soffisticato,che perň provoca numerosi errori che accrescono l'imprecisione del GPS. L'errore dell' effemeridi, č dato dal fatto che il satellite in quell'istante non si trova nel punto previsto, ma l'entitŕ di tale disturbo influisce di pochissimo sulla precisione totale del sistema. Gli errori del ricevitore sono dovuti in genere a disturbi elettromagnetici o ad errori di calcolo ma anche questo errore influisce poco sul risultato finale. L'errore maggiore č dato per lo piů dalla propagazione atmosferica poichč sebbene la luce abbia una velocitŕ di 300000 km/s nello spazio, non č cosě nell'atmosfera, poichč essa rifrange la luce e ne diminuisce la velocitŕ. Per accrescere la precisione del GPS, in campo aeronautico, si č ricorsi al GPS differenziale. Questo ha una precisione migliore poichč si basa sul calcolo della posizione di un vettore, e quindi trova largo utilizzo su una pista di atterraggio. Una stazione di terra di posizione nota, rileva la sua posizione da satellite e calcola l'errore, se un velivolo in avvicinamento sta utilizzando lo stesso satellite, la stazione di terra gli trasmette l'errore, il calcolatore elettronico del velivolo elabora gli errori trasmessi e stima una posizione che ha una imprecisione di qualche metro.