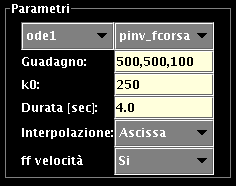
Per effettuare questo tipo di simulazione, bisogna sostituire i valori dei fine corsa dell'applet con i valori riportati dal libro di testo. La funzione set del pannello laterale, ci permette di richiamare la finestra di figura cap:Finestra-dei-parametri e di modificarne i parametri con i valori riportati dalla seguente tabella:
| #giunto | pos [deg] | min [deg] | max [deg] |
| 1 | 180 | -360 | 360 |
| 2 | -90 | -90 | 90 |
| 3 | -90 | -270 | -90 |
Impostiamo i parametri della simulazione come mostrato dalla figura:
e lanciamo la simulazione con lo stesso comando:
|
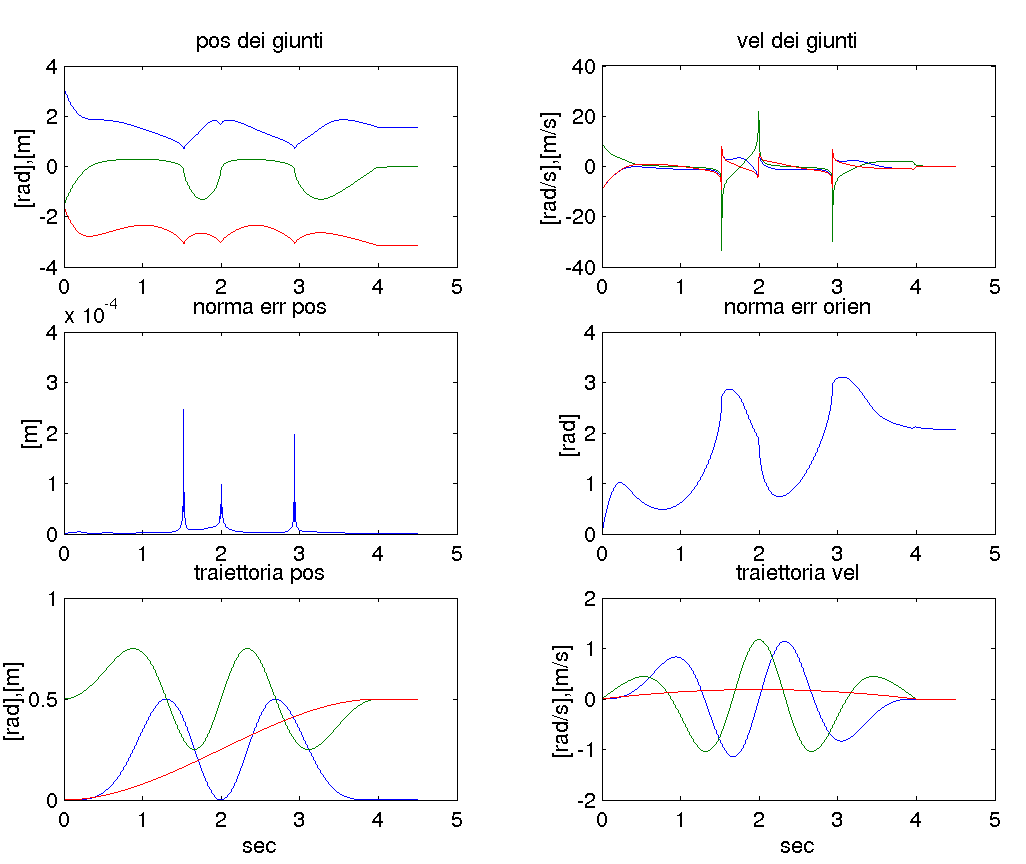
Nella figura si può notare la deriva dell'orientamento. |