Ora supponiamo di voler effettuare una simulazione che utilizzi
l'inversa dello Jacobiano come algoritmo per l'inversione cinematica.
Impostiamo i parametri per la simulazione sul pannello laterale come
mostrato dalla figura cap:Pannello-laterale-display, (l'intervallo
d'integrazione è per default) e lanciamo la simulazione
dalla console del simulatore con il comando:
movec 0.25 0.5 0 0 0 -1 4*pi 0.5 0 0.
Se non ci sono stati errori, il risultato della simulazione sarà
riprodotto dall'animazione del modello 3D del manipolatore. Se si
vogliono i grafici delle variabili, basta inserire il comando plot
nella console del simulatore; il grafico delle variabili è
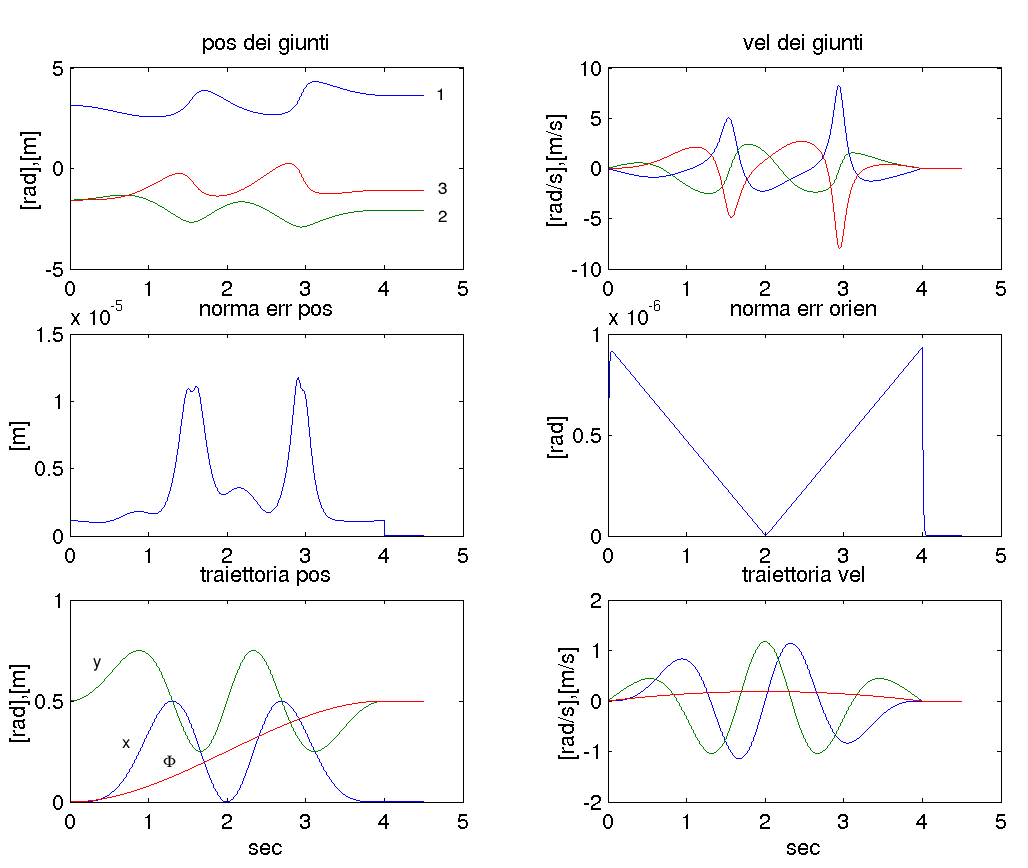
mostrato dalla figura cap:Planare-a-3inv. Confrontando i grafici della
figura con quelli riportati da [Lorenzo Sciavicco(2000)]
si notano delle differenze, esse sono dovute ai diversi profili di
traiettoria utilizzati per l'organo terminale.
Figure 5.2: Manipolatore
planare a 3 bracci, grafici delle variabili dell'algoritmo con inversa
dello Jacobiano.
I grafici che si riferiscono alla
traiettoria, rappresentano la traiettoria desiderata dell'organo terminale.
È possibile riprodurre la simulazione con la funzione Play
oppure passo-passo con la funzione Step del
pannello laterale (figure cap:Pannello-laterale-display e
cap:Finestra-di-riproduzione-passo-passo).