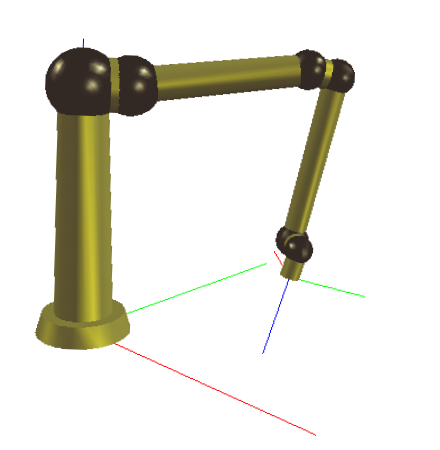
Utilizzando l'algoritmo che utilizza la pseudo-inversa dello Jacobiano con lo stesso comando, si evidenzia che la singolarità era dovuta alla configurazione del polso. Infatti, il manipolatore riesce a raggiungere la posizione finale.
I risultati della simulazione sono mostrati dalle figure cap:Manipolatore-COMAU-SMART3-conf-pinv e cap:Manipolatore-COMAU-SMART3-plot-pinv.
|
|
|
|