Supponiamo di voler far muovere comunque il robot dalla posizione
singolare, allora impostiamo l'algoritmo che utilizza l'inversa a minimi
quadrati smorzata dello Jacobiano e diamo il seguente comando dalla
console del simulatore:
move 0.5 0.5 0.2 0 0 0 .
Avremo come risultato quello mostrato dalle figure
cap:Manipolatore-COMAU-SMART3-smz-conf e
cap:Manipolatore-COMAU-SMART3-plot-smz.
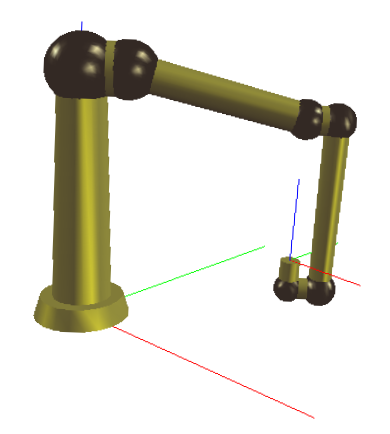
Figure 5.13: Manipolatore
COMAU SMART3, configurazione finale; algoritmo con l'inversa a minimi
quadrati smorzata dello Jacobiano
Figure 5.14: Manipolatore
COMAU SMART3, grafici della variabili dell'algoritmo con l'inversa a
minimi quadrati smorzata dello Jacobiano
L'utilizzo di questo algoritmo ha permesso che il manipolatore uscisse
dalla singolarità, pagandone il prezzo con un errore a regime.