 |
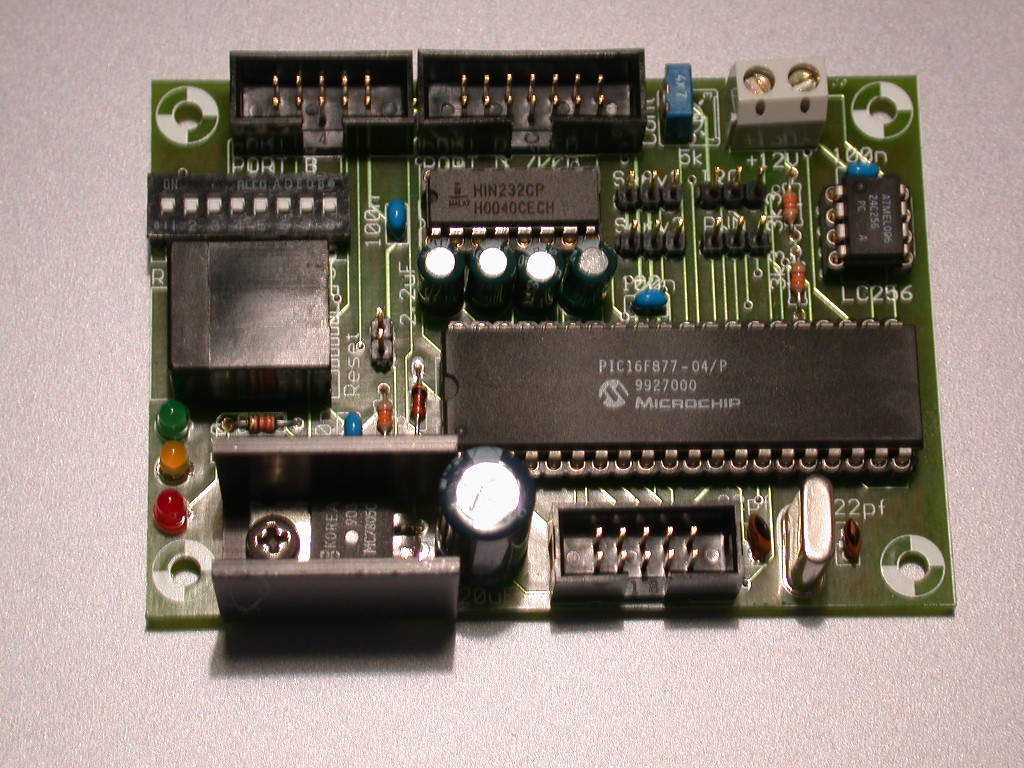
Roboboard CPU
Si tratta di una piccola mother board basata su di un microcontroller
potente idonea all'uso con piccoli robot amatoriali, il sistema è facilmente espandibile.

Caratteristiche tecniche: :
- Processore PIC 16F877 a 20MHz;
- Memoria esterna EEPROM fino a 64Kbyte (24C512);
- Fino a 8 linee d’ingresso Analogiche (0-5 Volt) a 10 bit 100ksample/sec;
- Fino a 33 linee I/O digitali;
- Comunicazione via RS232 e bus I2C con funzionamento anche in multimaster;
- Connettore dedicato per il collegamento di un display lcd alfanumerico;
- Due uscite PWM con risoluzione a 10 bit e carrier fino a 100 kHz;
- Due uscite dedicate per controllo servomotori;
- Dimensioni ridotte (8*6 cm);
- Assorbimento elettrico in standby minore di 5 mA;
- Alta velocità di esecuzione dei programmi, fino a 5 mips;
- Programmabilità tramite ICP (solo 3 fili);
- Otto dip switch permettono, se necessario, di impostare dei parametri definibili
dall’utente;
- Tutti i pin di I/O del processore sono riportati su 3 distinti connettori DIL;
- inoltre sono presenti connettori dedicati per collegare due servocomandi, per le
due uscite PWM, per il bus I2C, per la seriale RS232 e l'ICP;
- L'uso del pilotaggio PWM non pregiudica l'utilizzo delle due uscite per i
servocomandi e viceversa;
- Programmazione del processore tramite ICP oppure smontandolo dal suo zoccolo e
mettendolo direttamente sul programmatore.
|



{kind=link}