In questa seconda sezione sono stati trattati organicamente i fondamenti della navigazione moderna,
le Girobussole, il Radar, la cinematica ed i vari sistemi di radionavigazione.
Argomenti Trattati

Il Radar - Principio di funzionamento
Il trasmettitore genera un impulso radio ( 9 GHz in banda X , 3 GHz in banda S) che viene emesso dall'antenna direttiva e viaggia alla velocita' della luce (300.000 Km/s).
Comparando la velocita' di propagazione con il tempo di viaggio degli impulsi di ritorno, l'apparato calcola la distanza degli "echi" e li evidenzia sullo schermo. Si crea così l'immagine piana della zona circostante, con l'imbarcazione sempre rappresentata al centro (origine).
Quando le emissioni di altri radar producono disturbi ( linee curve tratteggiate che partono a raggiera dall'origine ) occorre attivare il filtro "IR" anti-interferenze.

La scala cromatica e' in relazione alla forza degli echi ricevuti: dal rosso dei segnali più forti si passa via via al giallo, al verde e all'azzurro. Quest'ultimo viene impiegato nelle funzioni TRAK e PILOT per evidenziare la traccia lasciata dai bersagli.
Su schermo monocromatico ( verde, arancione o giallo-ambra) l'immagine deve essere ben visibile anche con luce diurna.
Con cursore di rilevamento (EBL) si prendono i rilevamenti rispetto alla propria prora, mentre i cerchi fissi (RINGS) danno un'idea delle distanze. La marca mobile (VRM) e' un cursore che , portato su un bersaglio, ne indica la distanza dall'origine.
Il collegamento con GPS, LORAN, Satnav, Omega o Decca, permette di visualizzare la propria latitudine e longitudine (L/L), e altri dati accessori, sullo schermo radar.


GPS - Global Positioning System
Il sistema comprende 24 satelliti perfettamente sincronizzati giacenti in orbite circolari ortogonali fra loro ad una altezza di 11.000 miglia. Su ogni orbita ruotano 8 satelliti con un periodo di 12 ore, in questo modo si possono avere a disposizione sempre 4 satelliti sull'orizzonte per la determinazione del punto nave.

Principio di funzionamento
Il principio si basa sulla misura dell'intervallo di tempo fra l'emissione del segnale da parte del satellite e la ricezione dello stesso da parte del ricevitore di bordo. Poichè l'intervallo di tempo "Dt" moltiplicato per la velocita' di propagazione delle onde (radionde) "c" (300.000 Km/s) ci da' la distanza del satellite "H" :
H = Dt * c
si determina così una superficie sferica di posizione (un luogo di posizione) con centro nel satellite e su cui si trova la nave.
Per ottenere il punto nave occorrono più luoghi di posizione, quindi con altr due misure, di altrettanti satelliti, si individuano altre due superfici sferiche che intersecandosi con la prima forniscono il punto nave cercato.


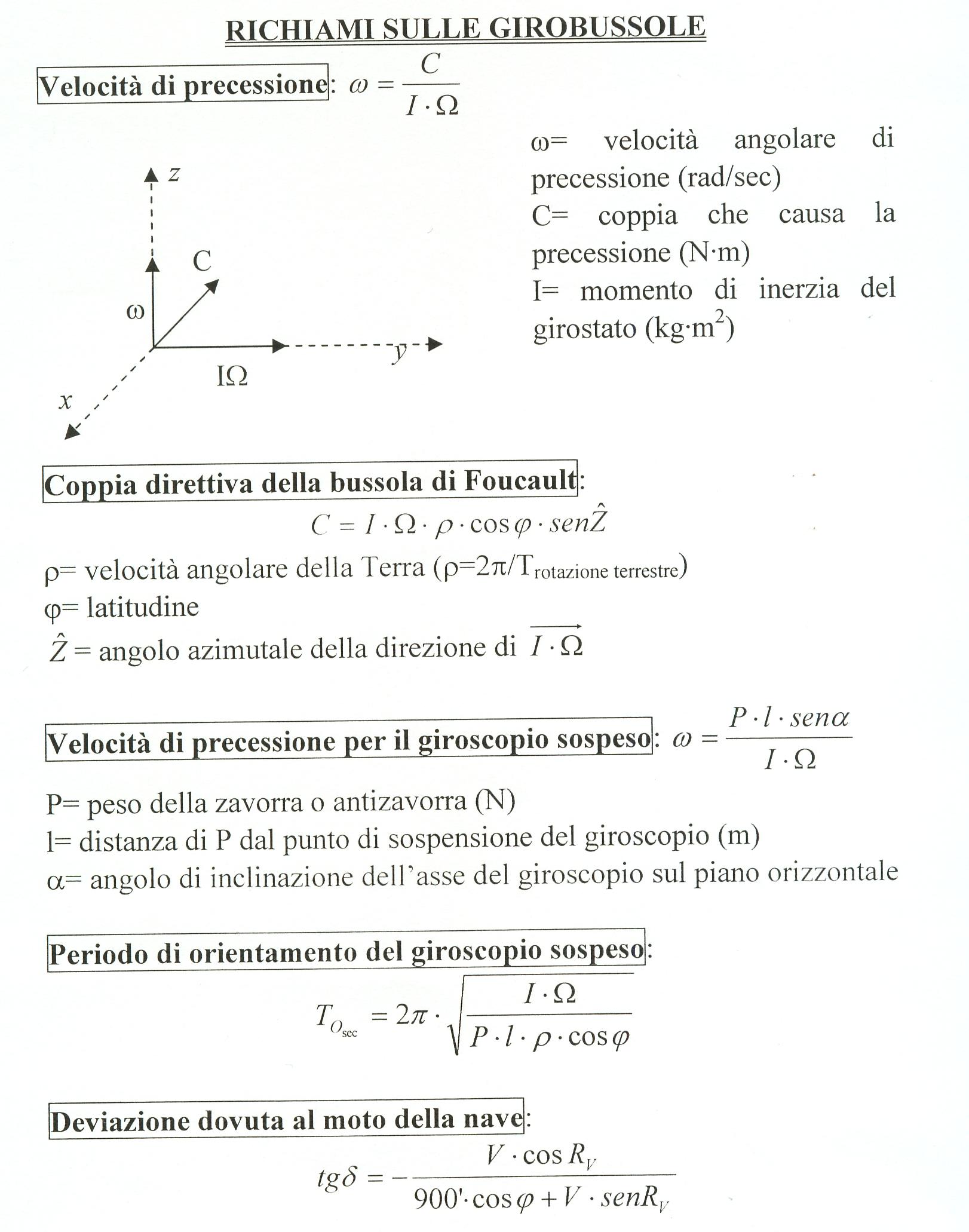
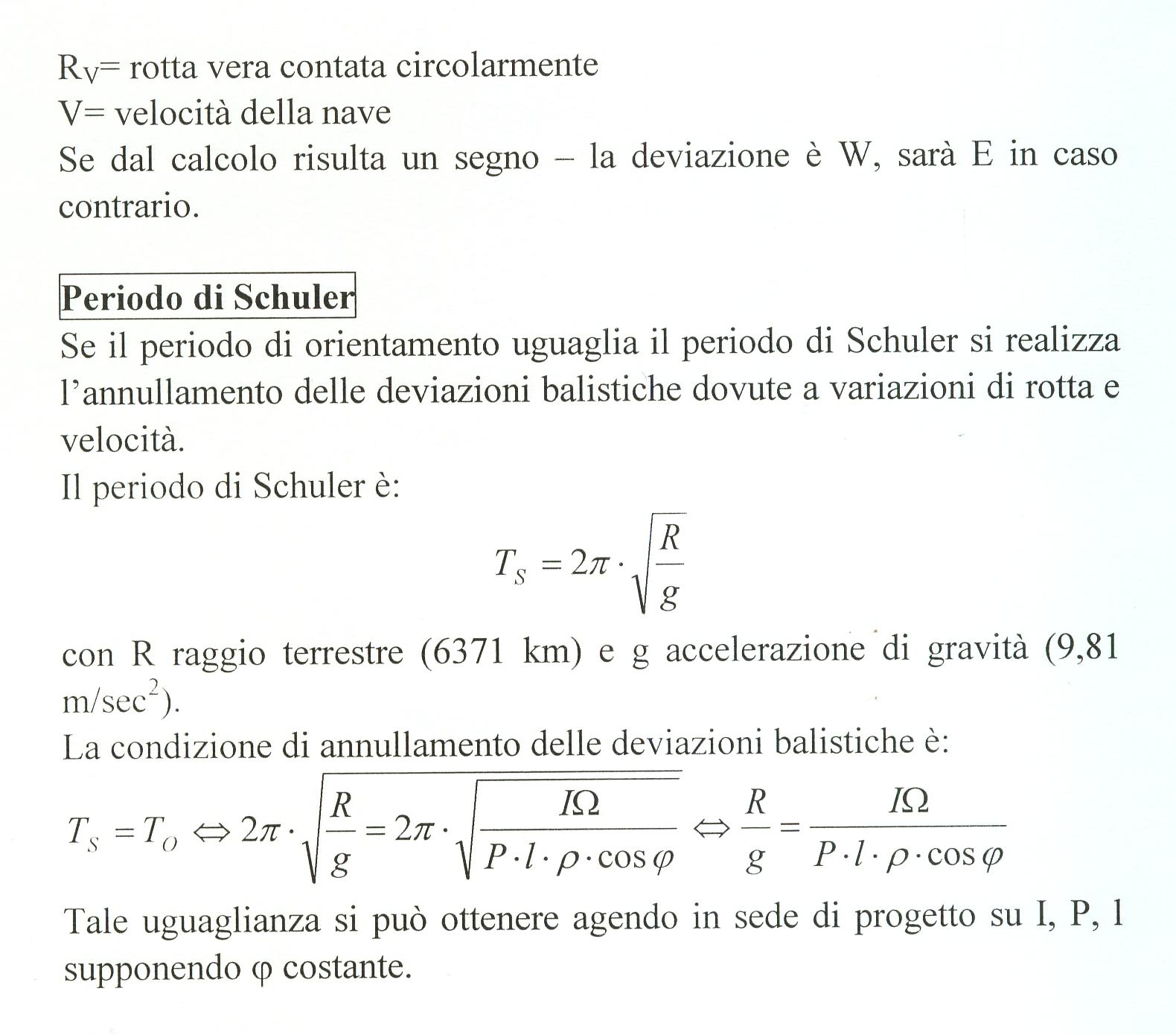
Le Girobussole
Questo dispositivo installato sotto copertanon risente dei movimenti della nave di rollio, beccheggio e virata che comunemente influenzano le bussole magnetiche.
Il cuore delle girobussole e' un giroscopio funzionante in modo che l'asse di rotazione possa cercare e mantenere l'allineamento con il meridiano geografico ( linea nord-sud). Questo è ottenuto combinando le caratteristiche del giroscopio, inerzia e precessione, con fenomeni naturali, la rotazione della terra e la forza di gravita'.
I sistemi di Navigazione Iperbolica
L'apparato di bordo e' un sistema di navigazione passivo che non trasmette nessun segnale ma riceve e misura automaticamente la differenza di tempo fra i segnali emessi da una coppia di stazioni chiamate master (padrona) e slave (schiava). Ll luogo di punti di uguale differenza di tempo da' una linea di posizione (LOP).
L'incrocio di due o più lops determina la posizione-nave.
Per trovare i lops e visualizzare dove si intersecano si usano le carte Loran.
Le onde radio inviate dalle stazioni schiave sono sincronizzate con le onde radio inviate dalla stazione padrona in modo da arrivare al ricevitore con un certo ritardo. La differenza di tempo tra l'arrivo al ricevitore del segnale della padrona e quello della schiava si chiama TD (time difference) e viene misurato in microsecondi (milionesimi di secondo).
Teoricamente la velocità di propagazione delle onde radio e' costante, così la differenza di tempo puo' essere trasformata in distanza. Da questo si deduce che, misurando la differenza di tempo fra l'arrivo del segnale della padrona e quello della schiava, il Loran può calcolare la differenza di distanza che c'è fra la sua posizione e quella della master, e contemporaneamente fra fra la sua posizione e quella della slave.
Le onde radio emesse dalle stazioni sono pulsanti :
la master (padrona) da' 9 impulsi
la slave (schiava) da' 8 impulsi
Il ricevitore di bordo puo' cosi riconoscere quale e' la master.
Dopo questo riconoscimento viene calcolata la differenza di tempo fra le due stazioni, che viene mostrata in microsecondi sul display, oppure trasformata direttamente in distanza, quindi il Loran puo' calcolare la posizione e mostrare direttamente sul display la latitudine e la longitudine.
Le carte Loran sono delle normali carte di navigazione , edite dall'istituto Idrografico della Marina, o da vari istituti di vari Stati, sulle quali sono state tracciate le linee di posizioni (lops).
All'inizio di ogni lop viene riportata una lettera con dei numeri. La lettera indica a quale stazione schiava si riferisce la lop, mentre il numero indica il TD (time difference), espresso in microsecondi, che c'è fra la stazione master e la schiava presa in considerazione.
La linea tracciata da' la rappresentazione grafica dell'unione sulla carta di tutti i punti di ugual TD.
Le carte Loran, che sono ancora regolarmente vendute, non devono essere usate per la normale navigazione perchè non vengono aggiornate.
Il punto nave si determina trovando l'intersezione dei due lops identificati.
Sistemi Radiogoniometrici
Sono stazioni dislocate sulle coste, in grado di rilevare il segnale emesso dalla nave e di comunicarlo alla nave stessa, su sua richiesta, sotto forma di rilevamento RG riferito al nord vero.
Tutte le informazioni riguardanti le stazioni RG si trovano sulla pubblicazione Radioservizi per la navigazione, dell'I.I.M. Le stazioni possono operare a gruppi o singolarmente.
Al contrario di quello che succede sui radiogoniometri di terra, i R.G. di bordo ricevono un segnale emesso da stazioni a terra (Radiofari) e ne stabiliscono la direzione di provenienza mediante la determinazioone del nullo acustico del segnale ricevuto.
Questo rilevamento della stazione a terra e' un rilevamento polare , cioè riferito all'asse longitudinale della barca (asse prua/poppa). La determinazione del nullo acustico si può ottenere sia con antenne fisse che con antenne a telaio girevole.
In pratica avviene questo: si sintonizza il radiofaro selezionandone la frequenza e riconoscendo il nominativo (segnale morse); si cerca il minimo o il nullo acustico del segnale ricevuto ( questo perche' e' più facile capire quando il segnale e' più debole o nullo); si prende nota della prora vera.
Per riportare il rilevamento sulla carta nautica bisogna conoscere la posizione della trasmittente ed applicare la formula:
Ril.vero = prora vera +/- rilevamento polare
Il rilevamento polare va sottratto se e' a sinistra, e addizionato se e' a dritta rispetto alla prua.