TRIPcommander
Ho
deciso di chiamarlo così.
L’idea
iniziale per la realizzazione di questo progetto è nata sul forum di Fuoristrada.it,
a causa dall'’esigenza
di avere uno strumento di aiuto alla navigazione durante i raduni, abbastanza
preciso e a basso costo. L’intento iniziale era quello di adattare un trip
computer da bici all’uso fuoristradistico, ma
alla fine ecco qui uno strumento completo (si dice che l’appetito viene
mangiando).
Caratteristiche
principali:
Alimentazione compresa tra 10 e 30 V continui
Display (singolo o doppio, o triplo o come si vuole) a 4 cifre che
permette la visualizzazione fino a 99Km e 990metri con la risoluzione di 10m.
Pulsante di reset (anche
remoto) per ogni display
Possibilità di utilizzare come sonda qualsiasi componente (sonde Hall, reed relè e simili) oppure circuiti esterni in grado
di chiudere verso il negativo l’ingresso del strumento.
Caratteristiche
costruttive:
Anche
se al primo impatto il circuito si presenta complesso, in realtà questa, solo
apparente, complessità circuitale è causata dal uso di componenti semplici e
poco costosi e dalla scelta di realizzare il circuito su una piastra a faccia
singola, scelta che la rende facilmente realizzabile anche con attrezzature
hobbystiche. Quindi:
Assoluta mancanza di componenti
costosi o di difficile reperibilità. Tutti i circuiti integrati sono dei
comunissimi c-mos serie 45xx reperibili anche da un buon fruttivendolo
Assoluta mancanza di componenti
critici o programmabili
Nessuna taratura del circuito
Nessuna particolare
strumentazione necessaria per la realizzazione.
Modularità
L'unico problema reale del TRIPcommander è rappresentato dalla necessità di realizzare il circuito stampato anche se ritengo possibile, ma molto rognoso, il montaggio del circuito sulla piastra mille fori per prototipi. Per risolvere questo problema sto cercando di mettere a disposizione una piccola serie di kit a prezzo di realizzo.
Il
principio di funzionamento.
La ruote della macchina per percorrere una distanza di 10 metri devono compiere un certo numero di giri (per esempio le gomme 205R16 compiono circa 4,3 giri per coprire un percorso di 10 metri). L’albero di trasmissione compirà un numero di rotazioni proporzionale a quello delle gomme moltiplicato per il rapporto di riduzione al ponte (per esempio 3,4 :1) . Avremmo quindi che gli alberi di trasmissione compiono circa 14.6 giri ogni 10 metri percorsi. Se noi installiamo la sonda, in posizione protetta in prossimità dell'albero di trasmissione, e sulla flangia dell'albero posizioniamo, per esempio, 4 magneti; otteniamo 58, 5 impulsi ogni 10 metri percorsi. Si può concludere che utilizzando 4 magneti siamo riusciti ad ottenere una risoluzione di circa (10/58.5=0.17) 17 centimetri e con un errore costante sui 10 m di (17 x 0.5 = 8.5) 8.5 centimetri e questo vuol dire che ogni km il mio strumento sbaglierà di +8.5 metri. Per ridurre questo errore bisogna variare il numero degli impulsi generati ogni 10 metri. Come?
Facciamo quattro conti:
i 14.6 giri per 10m restano costanti, se mettiamo:
magnettini impulsi impostazione risoluzione errore ogni 10 m
6 87.6 88 11cm -4,4cm
5 73 73 13cm 0cm
4 58.4 58 17cm +6,8cm
2 29.2 29 34 +6.8cm
1 16.6 17 60cm -24cm
Analizzando la tabella si può notare che l'errore non dipende dalla risoluzione della misura bensì dell'approssimazione della divisione. Quando il risultato della divisione è un numero intero l'errore si riduce a zero. Vediamo infatti che usando 6 magnettini abbiamo lo stesso errore che avremmo usandone soltanto 3, mentre usando 5 magnettini non c'è nessun errore nella misura. Ovviamente questi calcoli sono esatti solo se abbiamo misurato con precisione la circonferenza della gomma, e durante il percorso non abbiamo perso l'aderenza. Concludo che:
con 5 magnettini ho la massima precisione e questa, nel mio caso, sarebbe la soluzione ideale
con 3 magnettini ho uno scarto di -4.4 cm ogni 10 m
con 2 magnettini ho uno scarto di +7cm ogni 10 m
Considerando che ogni perdita di aderenza delle ruote genera un errore di segno positivo si potrebbe prendere in considerazione anche la soluzione con 3 magnettini in quanto l’errore del strumento viene compensato ( e su terreni difficili anche superato) dalle perdite di aderenza delle gomme.
Tecnicamente il circuito sarebbe in grado di rilevare quasi 1 milione di
impulsi al secondo e quindi al numero dei magnettini non c'è limite, ma attenzione che tutti gli sforzi per cercare la perfezione nel
conteggio verranno inesorabilmente vanificati dal consumo delle gomme a dalle
perdite d'aderenza durante il percorso.
Andiamo avanti.
Ora il
nostro treno d’impulsi, belli, lindi e perfetti incontra un circuito
contatore/divisore per 10 rappresentato dall’integrato U2 (un 4518). Questo
integrato, collegato come nel nostro circuito, funziona da contatore di impulsi
fino a 99. Il risultato del conteggio viene presentato in codice BCD (Binary
Coded Decimal) sui pin d’uscita dei due contatori presenti al suo interno e
precisamente:
bit
in uscita cifra
decimale corrispondente
0000
0
0001
1
0010
2
0011
3
0100
4
0101
5
0110
6
0111
7
1000
8
1001
9
sui
pin 14, 13, 12 e 11 vengono presentate le decine mentre sui pin 6,5,4 e 3
vengono rappresentate le unità del risultato del conteggio. Il circuito del
contatore, collegato opportunamente a un blocchetto di 8 micro switch, si
trasforma in un divisore programmabile. In
pratica se noi impostiamo sul micro switch il codice BCD del numero 31 otterremo
in uscita un impulso ogni 31 impulsi contati all’ingresso. Questo impulso di
risulta , dopo un ulteriore elaborazione di natura elettrica, ci serve per due
scopi:
1-
incrementare
di un unità il conteggio dei nostri display (abbiamo percorso 10 m )
2-
riportandolo
indietro (verso i pin 15 e 7 del integrato) viene usato per generare il reset
del contatore riportando a zero il conteggio. A questo punto il nostro divisore
è pronto per contare altri 31 impulsi nei prossimi 10 m percorsi.
L’impulso,
menzionato al punto 1, giunge ai contatori e, siccome
ogni impulso e direttamente legato ai 10 metri percorsi, questi si limitano a
presentare il risultato del conteggio direttamente ai driver per i display a 7
segmenti. Per realizzare il contatore a 4 cifre è stato
utilizzato lo stesso circuito integrato (4518), precedentemente impiegato come
divisore, la cui uscita è poi stata collegata all’ingresso di un suo gemello.
In pratica il primo contatore conta fino a 99 e poi ritorna a 00. Il ritorno a 0
del suo ultimo bit provoca l’ incremento del conteggio del secondo contatore
che a sua volta riesce a contare fino a 99. In questo modo abbiamo ottenuto un
conteggio fino a 9999 e siccome il contatore si incrementa ogni 10 metri,
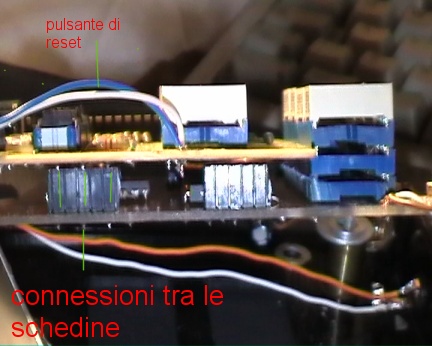
significa che la macchina ha percorso 99km e 990m. Il contatore si può resettare in qualsiasi momento premendo un tasto situato nelle vicinanze del
display, ma è anche prevista la possibilità di
collegare un pulsante di reset remoto, collegato mediante un cavetto, tenuto in
mano dal navigatore.
E
il secondo display?
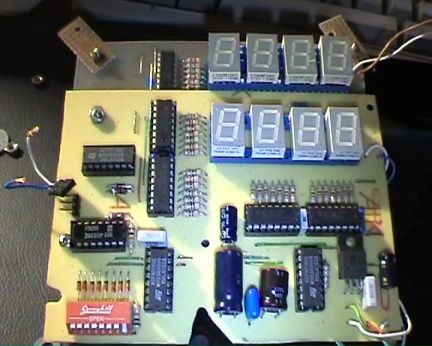
Il
secondo display c’è ma non si vede! Per avere due display bisogna costruire
un secondo circuito meccanicamente identico al primo, sul quale però vanno
montati solo i componenti che riguardano il conteggio e la visualizzazione. I due circuiti vengono sovrapposti e collegati sia meccanicamente che
elettricamente, mediante fori e piazzole sul circuito previsti per questo scopo.
Possibili
sviluppi?
Si
può aggiungere un interruttore di freez (per fermare il conteggio durante le
manovre)
Si
può far lampeggiare un led (o uno dei punti decimali dei display) al ritmo di
jazz :-) ... o dei impulsi inviati dalla sonda (controllo visivo se la sonda esiste
ancora oppure è rimasta nell’ultima buca di fango).
Il 4518, purtroppo (mi sono accorto di questo troppo tardi), non permette il conteggio all'indietro ma... aggiungendo un piccolo oscillatore... si potrebbe ottenere la funzione di preset. Cioè si azzera il display e poi con un pulsante si fa l' avanzamento rapido fino alla lettura voluta.
Insomma le possibilità di sviluppo sono molteplici e sono limitate solamente dalla nostra fantasia.
Istruzioni per la realizzazione
Prima di tutto dovreste procurarvi tutti i componenti necessari per la realizzazione del circuito.
Elenco componenti per il montaggio del circuito con solo un display a 4 cifre:
1 sonda magnetica, l'ideale sarebbe prendere un sensore Hall tipo Allegro A3141 o simili, ma anche un reed relè (ampolla di vetro con un contatto normalmente aperto) o i sensori reed industriali inseriti in un contenitore cilindrico di diametro compreso tra 6 e 12 mm. Il costo di questi componenti può variare tra i 3 e i 30 E.
qualche magnettino
R1, R4 1 K ohm
R5, Rreed 100 ohm
R2, R3 10K
R100-R128 720 ohm
C1 10 uF 16 V elettrolitico verticale
C2, C6, C7 0.1 uF poliestere passo 7mm
C5, C8 =0.47 uF poliestere passo 10mm
C3, C4= 470 uF (meglio di più che di meno),
C9 =3,3uF 16 V, elettrolitico, verticale
D1-D9= 1N4148 o simili
U1= HCF4093
U2, U3, U4= HCF 4518 o equivalenti
U5, U6,U7, U8= HCF 4511 o equivalenti
UX = MC7808 o equivalente (regolatore di tensione a +8V)
DL1- DL4= display 7 segmenti +punto da 12.7mm a catodo comune
SW1 =blochetto da 8 micro switch
1 interruttore
1 pulsante normalmente aperto (reset)
Quando vi siete procurati tutti i componenti potete cominciare a realizzare il circuito.
Per prima cosa dovete montare i 16 ponticelli evidenziati in rosso sullo schema di montaggio.
Decidete che tipo di sonda usare e, se serve, montate eventuali componenti aggiuntivi (Rreed, C9 )
Di seguito montate tutte le resistenze, i condensatori e i diodi
Saldate i display e tutti i circuiti integrati
Montate i uSwitch
TRIPcommander.pcb layout del circuito in formato Circad'98
Schema elettrico master schema di montaggio

Ricontrollate bene il circuito, specialmente le polarità dei condensatori elettrolitici e delle resistenze.
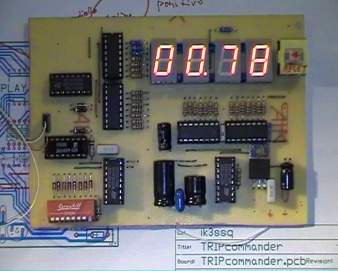
Una volta finito dovreste ottenere qualcosa tipo questo:

Realizzazione di Davide Zingale (segreteria@registrotoyota.191.it) Toyota BJ 42. TRIPcommander modificato con pulsante di freez, avanzamento veloce e contatore dei totali portato a 999km e 900 metri. Complimenti a Davide.

Damir S. 27/05/2003