Zetaplus is not a single robot, but the name of a family derived from MSZ-006 Zeta Gundam. The "x" in the general codename MSZ-006x can be substituted with different specific codes like C1, A1 and so on. I'll show in this document the state of development of my Zetplus model, built with solidThinking and Lightwave, concentrating mainly on the MSZ-006C1 Zetaplus C1 and MSK-006 (MSZ-006A1 custom Amuro Rei type).

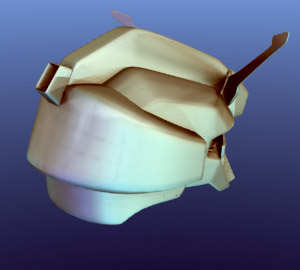
The first serie of images depicts the head of the Zetaplus. It still lacks a lot of minor details like vulcan guns and panel lines, but the general shape is definitive, and overall well proportioned. Custom foreheads will be developed later for customization of the standard Zetaplus scheme.





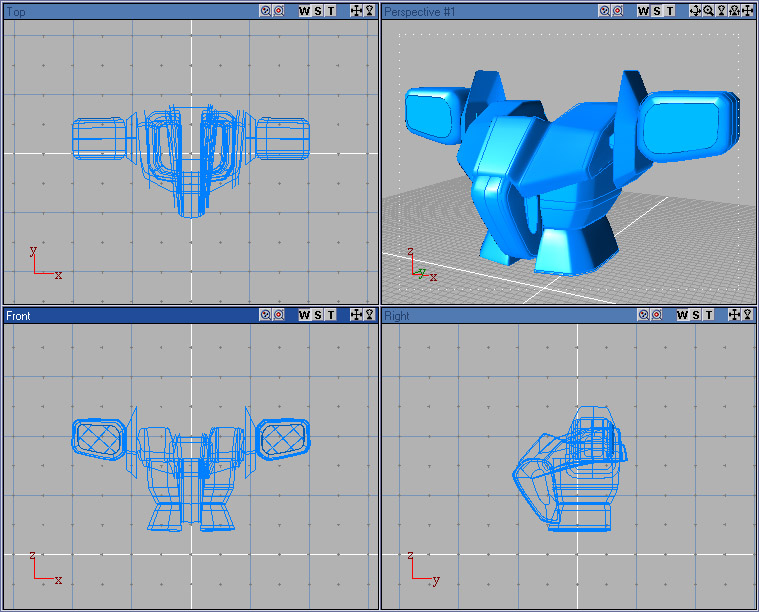
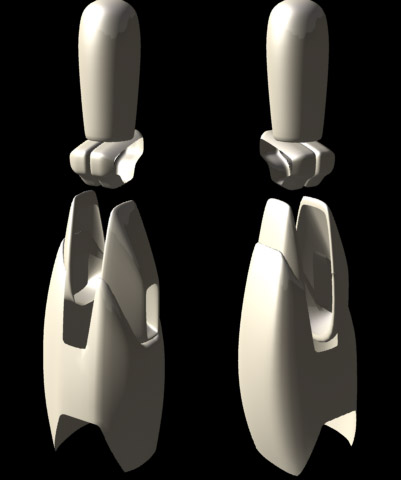
  I modeled low definition versions of the shoulders, side-plates and body in solidThinking, using NURBS skin tools. The level of detail is still low, and some surfaces are lacking, but the proportions are overall correct. The legs followed a similar path, with an initial low-detail NURBS construction to test different modeling schemes. I modeled low definition versions of the shoulders, side-plates and body in solidThinking, using NURBS skin tools. The level of detail is still low, and some surfaces are lacking, but the proportions are overall correct. The legs followed a similar path, with an initial low-detail NURBS construction to test different modeling schemes.
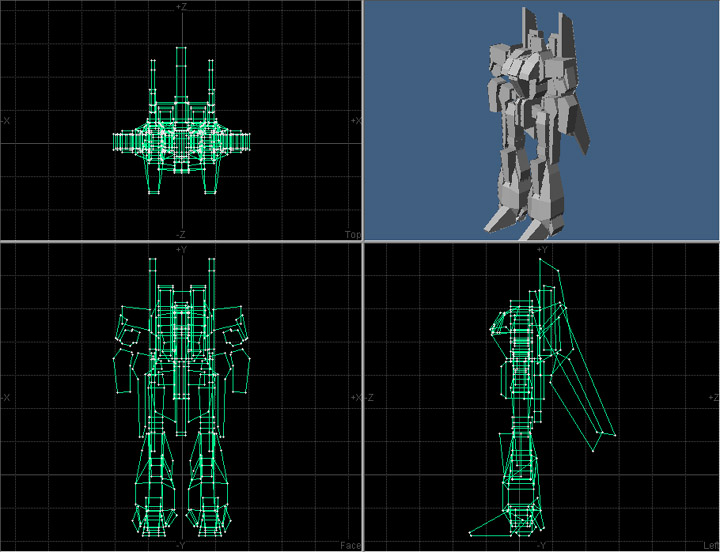
 As all the parts of the Zetaplus are going to be modeled separately, using different software, I had to find a simple way to put them together without having to fight with proportions, size and other issues. For this reason I derived a plain front view of the robot from the illustrations and lineart I had, then used the data gathered to produce a "soapbox" model of the Zetaplus. As all the parts of the Zetaplus are going to be modeled separately, using different software, I had to find a simple way to put them together without having to fight with proportions, size and other issues. For this reason I derived a plain front view of the robot from the illustrations and lineart I had, then used the data gathered to produce a "soapbox" model of the Zetaplus.
The soapbox model proved extremely useful in cleaning-up the transformation scheme of the zetaplus: I had no clues of how it worked except the informations from the instructions of the Bandai model. But the plastic model has some details that don't fit with the illustration, so I had to work out a "custom" more precise trasformation scheme.
 |
Transformation steps
|
All pictures are Copyright 2000 by Paolo
Zago

|