Next: Il programma Up: Curve di Bezier Previous: Tracciamento sullo schermo Indice
Inoltre, utilizzando la tecnica del Blossom (fioritura di punti) in un caso particolare, è possibile risalire ai punti di controllo del frammento di curva (punti che ho chiamato sotto-punti di controllo).
La tecnica del Blossom consiste nell'eseguire l'algoritmo di de
Casteljau variando ad ogni iterazione il valore del parametro t: la curva viene
così a dipendere da un numero maggiore di variabili (in pratica diventa una
superficie di ![]() con k pari al numero di parametri diversi usati.
con k pari al numero di parametri diversi usati.
Se voglio calcolare un punto di controllo cj della curva ridotta con con
![]() , se i punti di controllo sono n, basta che eseguo
un Blossom considerando l come valore del parametro nelle prime n-j
iterazioni e m nelle ultime i. In simboli:
, se i punti di controllo sono n, basta che eseguo
un Blossom considerando l come valore del parametro nelle prime n-j
iterazioni e m nelle ultime i. In simboli:
Castel(...): l
corrisponde a sta_t, m a end_t e l'ultimo parametro indica j
(cioè quale punto di controllo si vuole calcolare).
void paper::findSubCP(punto* cp,int ncp,double sta_t, double end_t,
punto* out){
for (int i=0;i<ncp;++i)
out[i]=Castel(cp,ncp,sta_t,end_t,i);
}
Questa proprietà si può sfruttare per costruire un algoritmo che cerca l'intersezione della curva assegnata con un segmento che può essere introdotto dall'utente:
La funzione che effettua il test tra il segmento e il minimax è riportata qui
sotto: i parametri di input sono le coordinate dell'angolo inferiore destro e
superiore sinistro del minimax. I vertici del segmento sono contenuti nella
variabile p_line[].
Il funzionamento è molto semplice: si controlla dapprima se uno dei vertici del segmento è interno al Minimax, altrimenti si cerca una eventuale intersezione del segmento con uno dei lati del rettangolo.
bool paper::lineAndMinimax(double min_x, double min_y, double max_x,
double max_y){
double x1=p_line[0].x;
double x2=p_line[1].x;
double y1=p_line[0].y;
double y2=p_line[1].y;
// Primo vertice dentro
if ( (x1>min_x) && (x1<max_x) && (y1>min_y) && (y1<max_y) )
return true;
// Secondo vertice dentro
if ( (x2>min_x) && (x2<max_x) && (y2>min_y) && (y2<max_y) )
return true;
// I vertici sono fuori...
// La retta la vedo con una rappresentazione parametrica :
// x=(1-t)*x1+t*x2
// y=(1-t)*y1+t*y2
// Valore del parametro che da' l'intersezione
// con x=min_x (per x)
double t=(min_x - x1) / (x2-x1);
for (int i=0;i<2;++i){
// Calcola la y dell'intersezione
double inter_y=t*(y2-y1)+y1;
// Il SEGMENTO interseca la retta verticale
// x=min_x (cioe' 0<t<1) e rimane
// all'interno del lato del rettangolo?
if ((t>=0) && (t<=1) && (inter_y <=max_y) && (inter_y >=min_y))
return true;
// Ripeti tutto per x=max_x
t=(max_x - x1) / (x2-x1);
}
// Valore del parametro che da' l'intersezione con y=min_y (per y)
t=(min_y - y1) / (y2-y1);
for (int i=0;i<2;++i){
// Calcola la x dell'intersezione
double inter_x=t*(x2-x1)+x1;
// Il SEGMENTO interseca la retta verticale
// x=min_x (cioe' 0<t<1) e rimane
// all'interno del lato del rettangolo?
if ((t>=0) && (t<=1) && (inter_x <=max_x) && (inter_x >=min_x))
return true;
// Ripeti tutto per y=max_y
t=(max_y - y1) / (y2-y1);
}
return false;
}
La funzione che realizza l'algoritmo completo è riportata qui. Si nota che per
la suddivisione della curva si usa la funzione findSubCP(...) definita
prima per trovare i sotto-punti di controllo. La funzione richiama se stessa
ricorsivamente ed usa il vettore int_p dichiarato all'esterno per
memorizzare i punti di intersezione trovati, e l'indice int_p_i che
memorizza sempre la prima posizione disponibile per l'inserimento:
void paper::xintersect(double st_t, double en_t, punto* int_p,
int& int_p_i){
double min_x,max_x;
double max_y,min_y;
punto *subcp=new punto[ncp];
findSubCP(cp,ncp,st_t,en_t,subcp);
findMinimax(subcp,ncp,min_x,min_y,max_x,max_y);
delete subcp;
if(lineAndMinimax(min_x,min_y,max_x,max_y)){
// If Minimax is little enough ...( 4x4 )
if ( ((int( (max_x-min_x)*xscale)) < 4) &&
((int( (-min_y+max_y)*yscale)) < 4) ) {
// ... then add this point ...
displayMinimax(min_x,min_y,max_x,max_y);
//... but if there is another point near this?
for (int i=0;i<int_p_i;++i)
if((abs(((max_x+min_x)/2 - int_p[i].x)*xscale)+
abs(((max_y+min_y)/2 - int_p[i].y)*yscale) )<6)
return; // Don't add it !
int_p[int_p_i].x=(max_x+min_x)/2;
int_p[int_p_i++].y=(min_y+max_y)/2;
}
else{ // reduce minimax
double eps=1e-6;
//first half
xintersect(st_t,(st_t+en_t+eps)/2, int_p,int_p_i);
//second half
xintersect((st_t+en_t-eps)/2,en_t, int_p,int_p_i);
}
}
return;// does not intersects
}
La tecnica di base della riduzione consiste nel considerare una curva come
proveniente da una processo contrario di elevazione del grado (parto
da n-1 punti di controllo e costruisco la stessa curva che ha n punti di
controllo), processo che al contrario non muta la forma della curva. Nel
processo di elevazione, detti ![]() i vecchi punti di controllo e bi
i nuovi si ha:
i vecchi punti di controllo e bi
i nuovi si ha:
La prima delle due formule è più precisa nella prima parte del poligono di
controllo, mentre la seconda e più precisa nell'ultima. Per questo nel mio
programma io le uso entrambe, applicando la prima nella prima metà dei punti di
controllo e la seconda nella seconda metà; se poi i punti sono dispari, il
punto centrale viene calcolato come la media dei due punti che si ottengono
applicando prima la prima formula e poi la seconda. Riporto qui il codice di
questa funzione che in input accetta il vettore di punti di controllo
old il numero di punti n ed un (eventuale) vettore (ret)
dove memorizzare i punti che risultano dalla riduzione.
inline punto* degreeReduction(punto *old, int n, punto *ret=NULL){
if (ret==NULL)
ret=new punto[n-1];
ret[0]=old[0]; //primo
ret[n-2]=old[n-1]; //ultimo
for (int i=1;i<n/2;++i){
// parte iniziale
ret[i].x=(n*old[i].x-i*ret[i-1].x)/(n-i);
ret[i].y=(n*old[i].y-i*ret[i-1].y)/(n-i);
// parte finale
ret[n-i-2].x=(n*old[n-i-1].x-(i)*ret[n-i-1].x)/(n-i);
ret[n-i-2].y=(n*old[n-i-1].y-(i)*ret[n-i-1].y)/(n-i);
}
// n dispari; fai la media dei punti centrali
if (dispari(n-1)){
int i=n/2-1;
ret[i].x=( ((n*old[i].x-i*ret[i-1].x)/(n-i)) +
((n*old[n-i-1].x-(i)*ret[n-i-1].x)/(n-i)) )/2;
ret[i].y=( ((n*old[i].y-i*ret[i-1].y)/(n-i)) +
((n*old[n-i-1].y-(i)*ret[n-i-1].y)/(n-i)) )/2;
}
return ret;
}
Se però si prova ad effettuare più di una riduzione applicando più volte questo metodo, si nota che ben presto la curva comincia ad allontanarsi molto da quella originale.
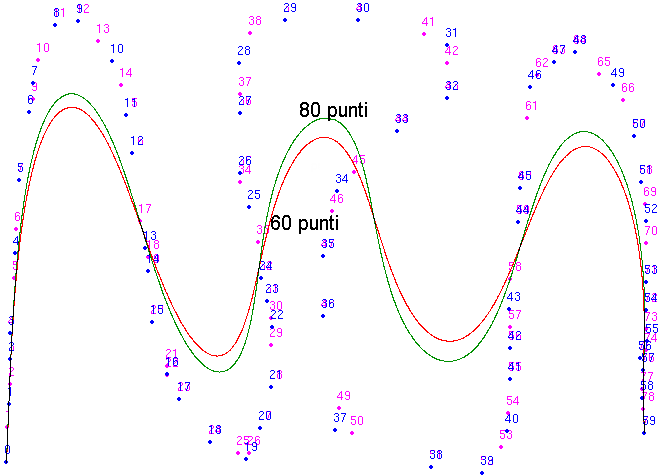
Per questo ho effettuato una piccola aggiunta che funziona bene quando si hanno molti punti di controllo: divido l'insieme dei punti in sotto-gruppi da 4 punti ed applico la riduzione a questi quattro, come se costituissero gli unici punti di una piccola curva; alla fine riunisco tutti i sottoinsiemi da 3 punti ottenuti. Così facendo uso l`algoritmo di riduzione in modo da perdere meno precisione possibile: passando da 4 punti a 3, il primo e l'ultimo punto rimangono fissi, mentre il secondo è ottenuto come media delle due formule di riduzione. La Fig. 1 mostra come l'algoritmo riesca a ridurre in un colpo circa un quarto dei punti di controllo, mantenendo la curva molto vicina all'originale.
Riporto qui il codice:
void paper::degRe(){
int punti_gruppo=4;
if (ncp<punti_gruppo+1) return; // pochi punti!
punto *tmp=new punto[(ncp/punti_gruppo)*(punti_gruppo-1)];
for (int i=0;i<ncp/punti_gruppo;++i)
degreeReduction(&cp[i*(punti_gruppo)], punti_gruppo,
&tmp[(i*(punti_gruppo-1))]);
int i=0;
for (;i<(ncp/punti_gruppo)*(punti_gruppo-1);++i)
cp[i]=tmp[i];
// qui i e' gia' stato incrementato...
for (int j=0;j<ncp%(punti_gruppo);++j)
// gli ultmi [1 2 3..n-1] punti vengono ricopiati
cp[i++]=cp[ncp-(ncp%punti_gruppo)+j];
delete tmp;
ncp=i;
repaint(TRUE);
++riduzioni;
}
Tocci Giovanni 2001-09-17
{kind=link}