Crabby : the last release
-----<>----- This is the last implementation of Crabby before passing at rev.2.
I have in fact added two whiskers to allow it to turn right or left when an obstacle is touched. This change doesn't notch the basic operation of the robot but put in evidence its limit. We return therefore to the explanation of the new circuit added to it:
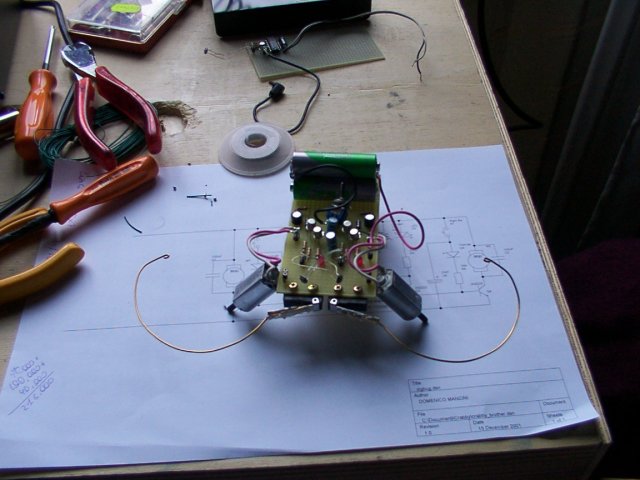
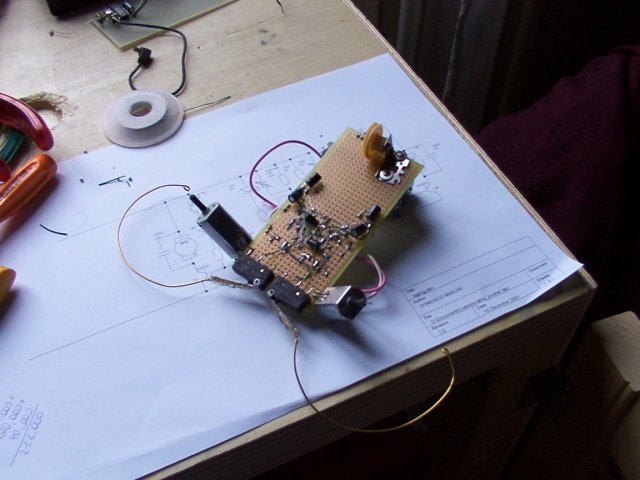
We have seen in the preceding page that the motors are operated alternatively giving a linear movement to the model but with oscillating gait. The motors are drivedd by an single transistor Q1 or Q4 that applies or not the voltage of feeding. When however the model meets an obstacle, it continues the attempt of advanced as if nothing had happened, however remaining bogged in that situation unless an unexpected and casual event allows him to disengage more clumsily. Has been thought therefore to add two switches operated by relative whisker that allows the model to feel the obstacle in enough time to have the necessary space to turn avoidink the obstacle. The whisker touching the obstacle loads the capacitors C5 or C6 instantly that then will be unloaded through the series DIODE-RESISTANCE on the transistor that drive the relative motor. This will operate continuosly the motor giving him more " strength " respect the other one doing it to veer. The problem rises however when the obstacle is frontal. The motors come operated both letting attack the model in hismarch gluing it on the obstacle. In this case in fact the model would have to withdraw for then veering, but not could reverse polarity to the motors because of the peculiarity of the design, so this behavior is not possible. This is his limit.It follows electric scheme and photos.
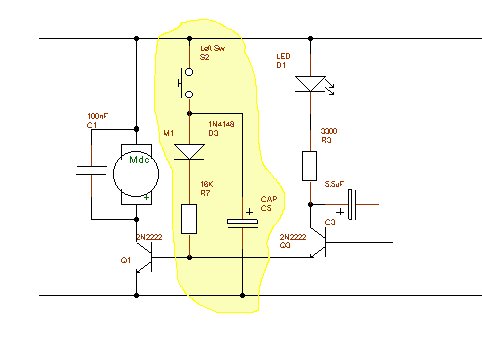
This is the left side. The right side is specular.