|
|
|||||||||||||
|
|
|||||||||||||
|
|
|||||||||||||
|
|||||||||||||
|
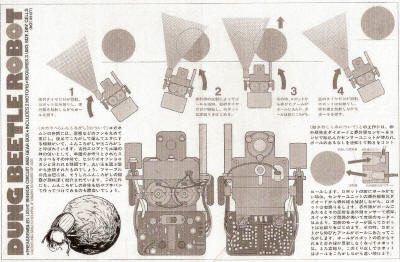
Alcuni anni fa ho trovato su internet la descrizione di un toy-robot denominato Dung Beetle Robot (letteralmente "robot scarabeo stercorario"). Nonostante le scritte siano in giapponese, si può facilmente intuire il funzionamento: il robot gira su se stesso finché non intercetta la palla; in questo caso procede in linea retta spingendo la palla in avanti, a imitazione dello scarabeo stercorario che spinge verso il nido grosse palle di sterco per provvedere il nutrimento alle sue larve. Purtroppo della documentazione di questo robot non mi è rimasto che il foglio, mezzo strappato, che si vede qui sotto:
Ho pensato che questo simpatico scarabeo robotico si poteva perfezionare e mi è venuto in mente di costruire un minirobot che interagisse con delle palline o con altri oggetti, mirando e spingendo questi oggetti mentre continua a tenerli sotto tiro davanti a sè. |
|||||||||||||
LA COSTRUZIONE: il robot non monta nessun micro e ha un comportamento puramente reattivo. Per cominciare è stato costruito un prototipo per verificare la validità dell'idea e valutare l'eventualità di modifiche e/o miglioramenti. La parti che compongono il robot sono:
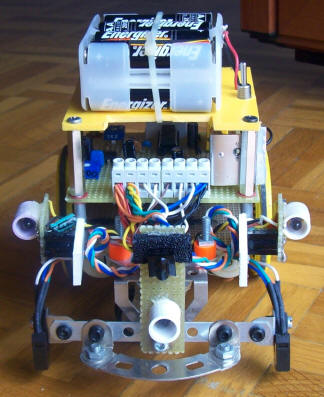
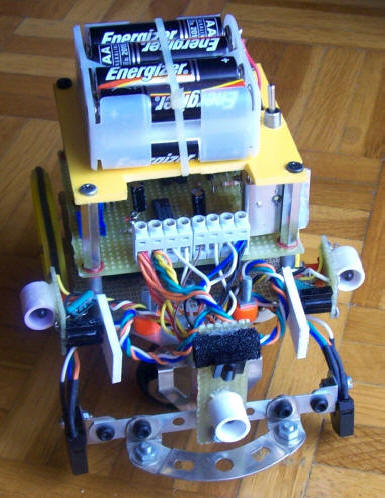
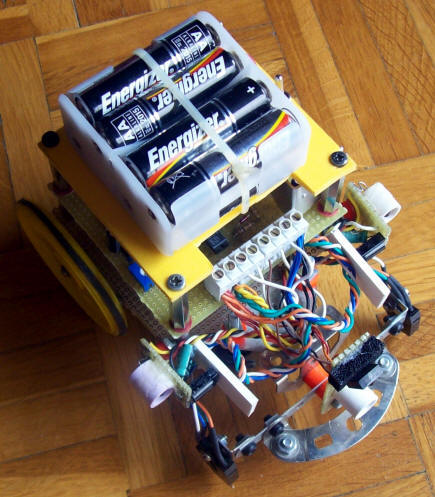
Per il prototipo è stato usato materiale di recupero ricavato da precedenti lavori. Le foto che seguono mostrano alcune fasi della costruzione. Tutti i componenti, tranne i sensori, sono montati su una basetta di 5 x 5 cm.
Quello che il robot riesce a fare è mostrato chiaramente nei video. Nei quattro filmati la
velocità del robot è stata aumentata portando l'alimentazione dei motori
da 5 a 12V NOTA: dato per scontato che l'elettronica funzioni a dovere, bisogna prestare la massima cura alla realizzazione dei sensori. Le prestazioni del robot dipendono al 90% dalla sensibilità e dal corretto posizionamento dei sensori, in particolar modo di quelli che devono tenere sotto tiro l'oggetto. MODIFICHE: qui di seguito vengono elencati i problemi che il prototipo ha messo in evidenza e le soluzioni adottate:
Dopo diverse prove e
aggiustamenti sul prototipo, è stata realizzata un nuova versione
del
MiniRobot SCARABEO
|
|||||||||||||
|
|
|||||||||||||
 MINIROBOT
SCARABEO
MINIROBOT
SCARABEO