| MINIROBOT
«ROBBY» |
ROBBY
è un rover che presenta le seguenti caratteristiche:
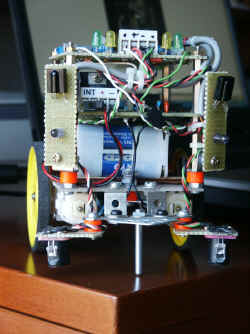
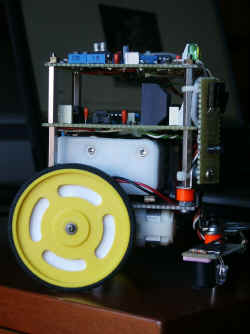
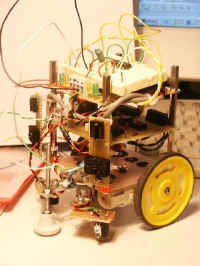
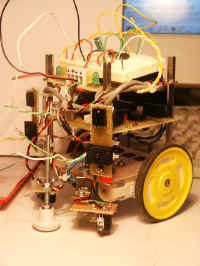
1. IL TELAIO Il robot impiega due motori GM3 (5V - 50mA / 224:1) acquistati con le relative ruote da Robot-Italy.
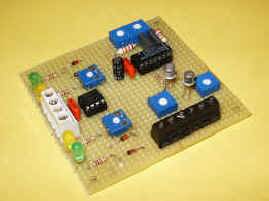
Il telaio vero e proprio è costituito da 3 pezzi (8x8 cm) di basetta millefori, fissati tra loro mediante distanziatori metallici. Sono stati utilizzati anche dei pezzi di Meccano e di Bral. 2. L'ELETTRONICA BigSumo è composto di 2 schede: A. stabilizzatore di tensione, accensione ritardata, monostabili, ponte H
Questa scheda monta due morsettiere: una per il collegamento della batteria e dell'interruttore di accensione; l'altra per il collegamento dei motori.
L'integrato stabilizzatore (LM2940) è stato montato su un dissipatore. Il condensatore C1 (valore consigliato nello schema della National: 0,47 mF) è stato sostituito con due capacità da 0,22 e 47 mF.
L'accensione ritardata è stata realizzata con un NE555. Il condensatore elettrolitico da 4,7 mF (del tipo tantalio) e la resistenza da 1,2M stabiliscono il tempo. Con i valori usati nello schema e un'alimentazione di 5V il ritardo è di 5 sec. L'uscita (OUT) è collegata ai piedini 1 e 9 (ENABLE) del driver (L293D).
Due NE555 vengono utilizzati anche per i multivibratori monostabili. Questi monostabili allungano l'impulso del sensore di bordo-campo di un tempo regolabile mediante il trimmer da 470K. In questo modo, ogni volta che un sensore intercetta la linea di bordo-campo, il robot esegue una sterzata nella direzione opposta. Il terminale TRIG (= trigger) è collegato con l'uscita del sensore (active low). Il terminale OUT va collegato all'ingresso del ponte H (pin 2 / 15).
Il ponte H impiega un integrato L293D della SGS-Thomson, formato da 4 driver da 1A che possono essere collegati a ponte per pilotare i motori.
Nel mio robot ho utilizzato un integrato L293D che contiene già al suo interno i diodi di protezione. I piedini 1 e 9 (ENABLE) sono collegati al ritardo di accensione (vedi sopra). È consigliabile tenere separata l'alimentazione dei circuiti (piedino 16) da quella dei motori (piedino 8). B. sensore di prossimità a infrarossi (oscillatore 36KHz); comparatore di tensione.
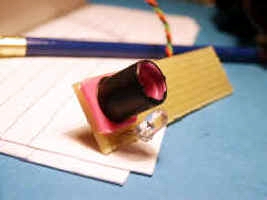
Il sensore di prossimità a infrarossi è composto da un oscillatore, realizzato con un CD40106 (inverter triggerato) seguito da un buffer.
Il trimmer da 5K regola la frequenza di emissione. Il diodo IR è pilotato da un transistor 2N2222. Il trimmer da 100 Ohm sul collettore regola l'intensità del raggio IR. In alcuni casi può essere necessario abbassare il valore della resistenza portandola da 22K a 18K.
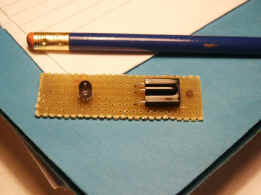
Su due piccole schede (cm 6x2) sono montati il diodo emittente e il modulo ricevente con i relativi componenti. Il ricevitore impiega un "classico" TSOP1736:
I sensori di superficie sono realizzati con un diodo LED ad alta luminosità e una fotoresistenza.
Le variazioni di luminosità sono convertite in variazioni di tensione per mezzo del partitore composto dalla LDR e dalla resistenza da 10K. Il trimmer fissa la soglia di intervento del comparatore di tensione (LM358).
Una serie di diodi LED segnalano lo stato dei sensori (LED acceso = sensore attivato).
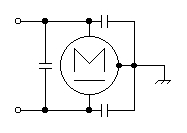
ELIMINAZIONE DEI DISTURBI GENERATI DAL MOTORE
Nello users manual del Dual H-Bridge Motor Driver di Lynxmotion vengono proposte alcune istruzioni per la riduzione del rumore dei motori e lo schema seguente:
COME COLLEGARE INSIEME I VARI "PEZZI"
ALIMENTAZIONE L'alimentazione è ottenuta da otto pile stilo da 1,5V per un totale di 12V. Utilizzando otto elementi ricaricabili al NiCd l'alimentazione totale sarà di 9,6V, ma in questo caso sarà meglio montare sul robot anche un caricabatteria.
|