|
ALIMENTAZIONE |
||||||||||||||||||||||||
|
Le normali batterie zinco-carbone e alcaline, pur essendo pratiche ed economiche, devono essere sostituite abbastanza spesso, tenuto conto che un piccolo robot può assorbire alcune centinaia di mA.
Per
informazioni su dimensioni e tipi di batterie vedi L'alimentazione ideale di un robot sarebbe l'energia solare. Purtroppo le celle fotovoltaiche hanno alcuni inconvenienti, primo fra tutti il costo piuttosto elevato. A questo va aggiunto che la corrente erogata è piccola (a meno di usare celle di grandi dimensioni, inadatte ai nostri scopi). Inoltre, in condizioni di luminosità scarsa (o nulla), il robot non funziona perché viene a mancare la tensione. Il problema può essere risolto adottando un'alimentazione "mista" di pannelli solari e batterie ricaricabili. Le batterie ricaricabili al NiCd (Nichel Cadmio) si trovano in commercio in vari formati e con varie capacità. Il costo è abbastanza contenuto. Richiedono una ricarica periodica che deve essere effettuata con un apposito limitatore di corrente:
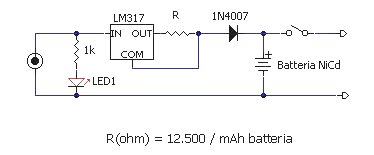
L'integrato
LM317 (uno stabilizzatore di tensione) viene usato qui come generatore di corrente
costante. La resistenza R determina la corrente di carica dell'accumulatore: il suo valore (in
Ohm) si calcola dividendo 12.500 per la capacità della batteria (in
milliampère/ora). Nella tabella che segue diamo il valore di R (arrotondato
al valore commerciale più vicino) per alcune delle capacità più comuni:
Il LED (opzionale) segnala quando c'è tensione in ingresso. Il diodo (1N4007) impedisce che la batteria si scarichi sull'integrato quando l'alimentatore non è collegato.
Il circuito che segue serve per caricare la batteria al NiCd con una corrente costante (determinata dal valore della resistenza R). È prevista anche una connessione (+PS) per un pannello solare di bassa potenza. :
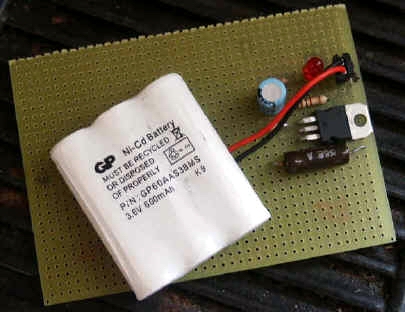
Qualcosa di ancora più semplice si può realizzare con un transistor e una manciata di componenti:
La resistenza R si calcola con la formula: ohm = [(volt zener - 1,4) / mA] x 1000 dove "mA" è la corrente di carica della batteria (1/10 della capacità in mAh). Quindi per un pacco di batterie da 600mAh avremo: [(5,1 - 1,4) / 60] x 1000 = 61,6
Il caricabatterie può essere montato all'interno del robot, così da poter ricaricare le batterie senza toglierle dall'apparecchio. All'ingresso va collegato un alimentatore che fornisca una tensione superiore a quella della batteria da caricare e una corrente sufficiente alla ricarica. Le batterie vanno caricate per un periodo di 14 ore. Per evitare il pericolo di over-charge è possibile collegare un timer che disconnetta automaticamente il caricabatteria.
ALCUNE INDICAZIONI SULL'USO DELLE BATTERIE NiCad
ESEMPIO PRATICO:
Per ricaricare le batterie e collaudare i circuiti occorre un alimentatore stabilizzato. Se ci serve una tensione fissa, il modo più semplice per realizzarne uno è di utilizzare gli integrati stabilizzatori della serie 78xx. Questi integrati hanno tre piedini: Vin, GND e Vout e sono commercializzati con valori che vanno da 5 a 24 Volt:
Ecco lo schema di un alimentatore che fornisce una tensione di 12V/1A utilizzando un integrato 7812:
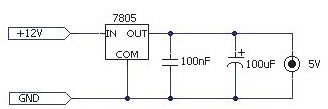
Con una semplice aggiunta si può
ricavare anche un'uscita a 5V (integrato 7805):
Quest'altro alimentatore
(che utilizza l'integrato LM317) fornisce un'uscita variabile da 1.5 a 13.5V, regolabile per mezzo di un
potenziometro lineare da 2200 ohm:
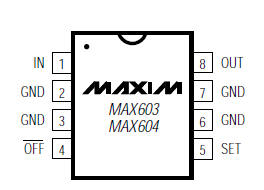
NOTA: i trasformatori hanno un secondario da 15V. Gli integrati stabilizzatori (7812, 7805, LM317) vanno montati su un dissipatore di calore. Per ottenere una tensione stabilizzata di 5V si può utilizzare anche l'integrato MAX603 della Maxim. Questo integrato accetta in ingresso una tensione massima di 11,5V e fornisce una corrente di 500mA. Ha una bassa tensione di drop-out, cioè fornisce in uscita 5V con una tensione minima d'ingresso di soli 5,32V. Il circuito applicativo è tratto dal datasheet della Casa produttrice:
Caratterizzato da una bassa tensione di drop-out (0,5 - 1V) è anche l'integrato LM2940, in grado di fornire una corrente di 1A. L'integrato è protetto contro l'inversione di polarità in ingresso. Lo schema che segue è tratto dal datasheet della National:
|
||||||||||||||||||||||||
 ATTENZIONE: alcuni circuiti sono collegati
alla rete elettrica e se toccati possono provocare scosse elettriche
potenzialmente mortali!
ATTENZIONE: alcuni circuiti sono collegati
alla rete elettrica e se toccati possono provocare scosse elettriche
potenzialmente mortali!
|
||||||||||||||||||||||||