|
SENSORE
DI PROSSIMITÀ A INFRAROSSI |
||
|
Il sensore di prossimità a raggi infrarossi funziona sul principio del sonar. Un trasmettitore (Tx) collocato sul robot emette un raggio di luce infrarossa. Se il raggio intercetta un ostacolo, viene riflesso verso il robot, ed è captato da un sensore (Rx):
Per fare in modo che il sensore non
venga influenzato dalla luce ambientale o da altri segnali, si modula il
raggio infrarosso con un'onda quadra. Solo sintonizzando il ricevitore sulla stessa frequenza del
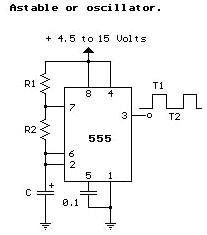
trasmettitore, si può ricevere il segnale trasmesso. 1. TRASMETTITORE Il modo più semplice per modulare il raggio del LED infrarosso è utilizzare un integrato NE555 in configurazione astabile.
COMPONENTI: R1 (1k) - R2 (47k) - C (1nF) per una frequenza di Hz. Sostituendo R2 con un trimmer dello stesso valore, si può regolare la frequenza in uscita. L'uscita dell'oscillatore va collegata a un LED emittente all'infrarosso, direttamente o tramite un transistor pilota. La resistenza R va calcolata in base alla tensione di alimentazione e alla corrente che si vuole far assorbire al LED:
2. RICEVITORE Il ricevitore utilizza un integrato NE567 (Tone Decoder/PLL). L'uso del PLL permette di separare in modo soddisfacente il raggio IR modulato dalle fonti di disturbo (come ad es. la luce ambientale). Infatti in uscita abbiamo un livello logico 0 solo quando la frequenza di modulazione del raggio captato dal sensore è uguale a quella generata internamente dal PLL.
Per calcolare il valore
di C e di R vedi qui All'ingresso del Tone Decoder applichiamo il segnale captato da un sensore infrarosso (fototransistor / fotodiodo). 3. SENSORE All'ingresso dell'integrato NE567 (piedino 3) si collega un fototransistor o un fotodiodo:
Q1 e D1 sono fotoelementi sensibili all'infrarosso (ad es. SFH309 o, meglio, SFH205 - BPW41N). La resistenza ha un valore di 10-100K (da trovare sperimentalmente). COLLAUDO Il terminale d'uscita del NE567 (pin 8) va collegato al circuito utilizzatore. All'uscita abbiamo un livello logico 0 quando il sensore è illuminato (active low). Per visualizzare lo stato del PLL è utile collegare un LED e una resistenza da 1K tra il pin 8 e +V (quando il PLL è agganciato, il diodo LED si accende). Vedi anche:
|
||