|
MODULI
RICEVENTI A INFRAROSSI |
|||||||||||||||
|
Rispetto ai fototransistor / fotodiodi, i moduli riceventi IR integrati presentano diversi vantaggi:
I sensori integrati sono costituiti da un fotodiodo IR e da un amplificatore+filtro passabanda+elettronica di controllo, montati in un piccolo contenitore plastico che funge da filtro IR. Presentano tre piedini (diversamente disposti secondo la casa produttrice): +Vcc, massa e OUT. In uscita si ha un livello logico 0 quando il sensore è colpito dal raggio IR (active low). Lo schema a blocchi seguente è tratto dal datasheet della Casa produttrice (Vishay Telefunken):
In commercio esistono sensori IR tarati su diverse frequenze (normalmente comprese tra 30 e 40 KHz). Nei datasheet sono riportate le tabelle con le frequenze relative ai moduli Vishay Telefunken serie 17xx e 18xx. Quando si usano questi moduli è importante tenere presente alcune cose:
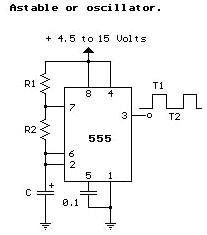
1. TRASMETTITORE Per realizzare un sensore di prossimità è necessario innanzitutto costruire un trasmettitore in grado di oscillare sulla frequenza del modulo IR che vogliamo usare.
Sostituendo
la resistenza R2 con un trimmer è possibile variare la frequenza
dell'oscillatore. Nella tabella sono riportati i
valori (indicativi) di C - R1 - R2, la frequenza in uscita e i sensori da utilizzare (alimentazione 5V):
Collegare
un frequenzimetro al pin 3 del 555 e regolare la frequenza dell'oscillatore ruotando il
trimmer.
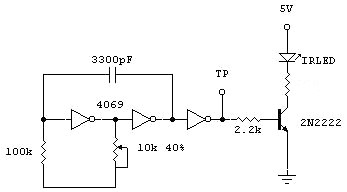
La resistenza di carico R va calcolata in base alla tensione di alimentazione e alla corrente che deve assorbire il LED, secondo la formula ROhm = (VAlim - 1,5 - 0,6) : Adiodo dove 1,5 è la tensione (media) di alimentazione del diodo IR e 0,6 la caduta di tensione sulla giunzione CE del transistor (1,2 se si usa un darlington), mentre A è la corrente che deve assorbire il diodo. Si possono realizzare oscillatori in tanti altri modi. Lo schema che segue presenta un oscillatore realizzato con un integrato CD 4069 (inverter non triggerato):
Per la taratura, collegare un frequenzimetro a TP (test point) e regolare la frequenza dell'oscillatore ruotando il trimmer da 10K. Per ridurre la potenza del raggio IR aumentare la resistenza di collettore (provare 33 - 56 Ohm con un'alimentazione di 5V). 2. RICEVITORE Il ricevitore IR utilizza un modulo TSOP (Vishay Telefunken). Lo schema del circuito applicativo è preso dal datasheet della Casa costruttrice:
La resistenza da 100 Ohm e
il condensatore elettrolitico da 4,7mF servono a ridurre i disturbi presenti
sulla linea di alimentazione.
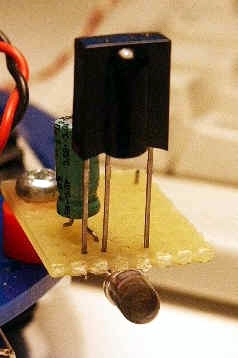
Nella foto si vede un modulo TSOP1736 montato su una basetta di 2,5 x 2 cm. Sotto la basetta è saldato il LED emettitore infrarosso.
MODULO RICEVENTE PANASONIC PNA4602 Un eccellente modulo ricevitore a IR è il PNA4602 della Panasonic. Questo modulo presenta una sensibilità molto elevata, al punto che riesce a rilevare oggetti ad alcune decine di centimetri alimentando il diodo emittente con appena 3,5mA! Lo schema che segue comanda due diodi emittenti a IR con un segnale di 38KHz ed è quindi adatto per costruire un sensore di prossimità con questo modulo:
Un multivibratore astabile, costruito con il solito 555, fornisce l'onda quadra a 38KHz. Il trimmer da 10K (multigiri) regola la frequenza. I due transistor (2N3904) pilotano i diodi emittenti IR, mentre i trimmer da 1K in serie al LED servono per regolare l'intensità del raggio emesso. Il ricevitore non necessita di componenti aggiuntivi, tranne un condensatore da 0,1 mF (100.000 pF) saldato tra i piedini GND (2) e Vcc (3). Il segnale (active low) viene prelevato dal piedino 1. NOTA: data la sensibilità del modulo, una certa attenzione va prestata alla disposizione dei diodi emittenti IR. Non è raro che il robot "impazzisca" perché il modulo ricevente capta il raggio emesso dal diodo IR addirittura della parte opposta! In questo caso conviene mettere dei piccoli schermi di materiale opaco direttamente vicino al modulo. |
|||||||||||||||