Qui sotto i link al sito
www.i-d01.deagostini.it
per scaricare i file pdf con le istruzioni di montaggio.
(Attenzione i file possono impiegare parecchio tempo per essere scaricati)

|
Questa fase di montaggio porterà all’installazione della
Motherboard e del modulo Voice. Si potrà quindi cominciare a ‘dialogare’ con
I-Droid01, impartendo comandi vocali e ricevendo le risposte del robot, che
‘parlerà’ attraverso un piccolo altoparlante. In questa fase si potrà alloggiare
nella parte frontale del torso tre pulsanti, che permetteranno di navigare
all’interno di alcuni menu, e il display, che mostrerà alcuni messaggi
riguardanti lo stato di I-D01. Inoltre, con gli elementi ricevuti in questa fase,
si potrà comporre le scatole dei due motori che azioneranno le braccia di
I-Droid01. |
|
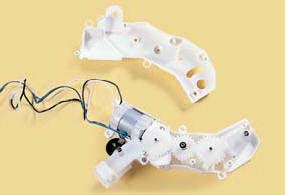
Motori per braccia Le braccia di I-Drodi01 saranno mosse ciascuna da un motore elettrico, che permetterà di alzare o abbassare l’avambraccio all’altezza della spalla. Le scatole che conterranno i motori saranno posizionate all’interno del torso, alla destra e alla sinistra di quella che contiene il motore di movimento destra/sinistra del collo (vedi foto qui a lato). Anche questi motori, come quelli usati per muovere la testa, saranno dotati di appositi encoder.
|
 |
|
|
Con i pezzi forniti nei fascicoli
17,18 e 19 si potrà assemblare la
scatola del motore che muoverà il braccio sinistro di I-D01, alzandolo e
abbassandolo all’altezza della spalla. Seguire attentamente le fasi di
montaggio descritte per ottenere l'esatto allineamento tra gli
ingranaggi e l'encoder. Lubrificare gli ingranaggi. La trasmissione del movimento interno delle scatole dei motori può essere facilitato e reso meno rumoroso lubrificando in modo appropriato le ruote dentate che realizzano gli ingranaggi, applicando su di esse con un piccolo pennello del grasso da modellismo. È molto importante che l’applicazione del lubrificante sia effettuata con attenzione, evitando di ingrassare le cinghie di trasmissione che altrimenti slitterebbero. Lubrificare maggiormente gli ingranaggi sottoposti alle velocità più elevate.
|
 motore braccia |
 |
 particolare dell'encoder |
||
|
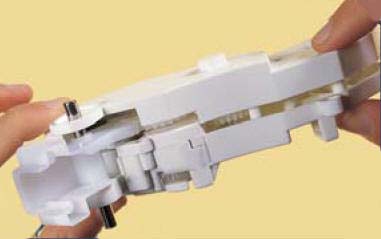
Il corretto funzionamento del movimento delle braccia dipende dalla posizione assunta dai due alberi di movimento che fuoriescono dalle scatole: è opportuno controllarne la posizione sin d’ora, per evitare di avere sorprese indesiderate quando, in una delle prossime fasi, saranno montate le braccia. La posizione corretta Per verificare la posizione degli alberi di movimento è sufficiente osservare I-Droid01 da un lato e poi dall’altro, prestando attenzione particolare agli alberi. Questi presentano, alla loro estremità che fuoriesce dal torso, una protuberanza a forma di semicerchio: che può essere usata come riferimento nella verifica. Consideriamo per primo il lato sinistro del robot (intendendo quello sinistro rispetto al robot stesso): la protuberanza dell’albero di movimento deve essere rivolta verso il retro del robot (vedi foto sotto a sinistra). Passando al lato destro del robot, invece, la protuberanza deve essere rivolta verso il fronte del robot, così come mostrato nell’immagine qui sotto. Se così è, la posizione degli alberi è corretta e non è necessario alcun intervento.
|
|
|
|
|
|
Se, invece, la protuberanza si trova in posizione scorretta, è necessario rimuovere le scatole dalla loro sede, aprirle e controllarne gli elementi interni. Per prima cosa bisogna verificare l’allineamento dell’albero di movimento con la ruota dentata con cui ingrana: per la scatola del braccio sinistro, la piccola tacca della ruota deve trovarsi in corrispondenza del contrassegno L dell’albero; per la scatola del braccio destro, invece, la piccola tacca deve corrispondere al contrassegno R. Se gli allineamenti risultano corretti, ma la posizione degli alberi no, il problema potrebbe risiedere negli alberi stessi. Questi sono costituiti da due parti separabili: un asse e una ruota dentata. Una volta separati (basta spingere l’estremità dell’asse opposta alla protuberanza), si può notare come la ruota presenti due scanalature nel foro circolare centrale, poste una nelle vicinanze del contrassegno L e l’altra vicino a quello R; l’asse, invece, presenta una tacca, di forma simile a quella delle scanalature. Per l’albero della scatola del braccio sinistro (quella con il motore dai fili giallo e bianco), la tacca dell’asse deve essere inserita nella scanalatura della ruota vicina al contrassegno L; viceversa, l’asse dell’albero posto nella scatola del motore destro (con il motore dai cavi marrone e bianco) deve avere la tacca inserita nella scanalatura della ruota che si trova accanto al contrassegno R. Montando in modo corretto gli alberi e allineando gli elementi nella scatola, la posizione degli alberi stessi dovrebbe infine risultare corretta. |
|
|
|
|





|
Con il fascicolo 23 e 24,
vengono forniti il
Display programmabile e la
Tastiera, che verranno
inseriti nella parte frontale del torso. Nella foto a destra è visibile
il torso, fronte e retro, con il display.
|
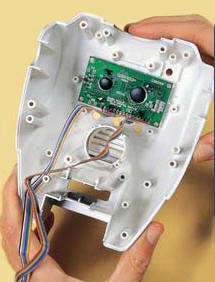  viste del display inserito nel torso |
|
|
 vista del modulo display |
|
|
 vista del retro del modulo Display. |

Anche Il microfono, fornito col numero 27, verrà inserito nella parte frontale del torso. |
|
|


|
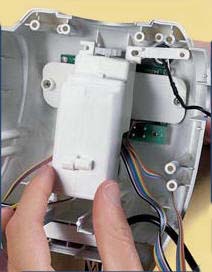
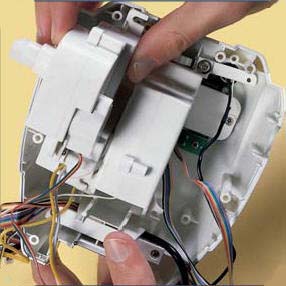
Si procede ora all'inserimento delle scatole motore del collo e delle braccia nel torso.
|
|
|
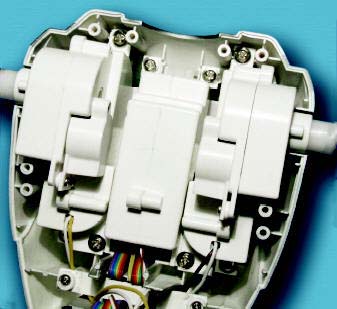
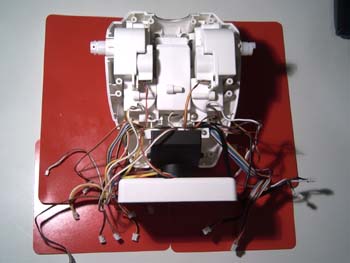
Ed ecco come appare l'interno del torso,
dopo aver inserito i tre motori (collo e bracci). |
|
La Motherboard è fondamentale: anche se non è la più importante dal punto di vista computazionale, gestisce l’alimentazione di tutti i sistemi posti a bordo del robot. Essa presenta diversi connettori che, tra l’altro, la collegheranno al bus di comunicazione, alla scheda Voice, alla tastiera e al display posti nella parte frontale del torso. Inoltre, la Motherboard sarà collegata al marsupio, così da monitorare il livello di carica delle batterie. La Motherboard è equipaggiata con il microcontrollore a 8 bit (Freescale MC68HC908AP8), dotato di una memoria Flash di 8 KB e di una memoria RAM di 1 KB.
|
|
|
|
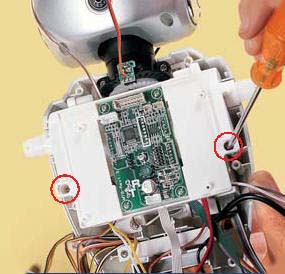
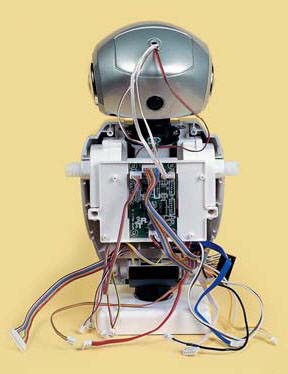
Ed ecco come viene inserita la motherboard all'interno del torso.
Dopo aver installato il Display e la Motherboard è possibile testarne il funzionamento; vedere la descrizione su: Test_Motherboard |
|


Scatola motore bacino Viene fornita con i numeri 29, 30, 31 e 32, ma verrà utilizzata solamente nelle prossime Fasi. Nelle foto a destra e sotto, alcune fasi di montaggio. |
|
|
|
|

|
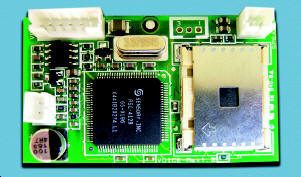
Scheda Modulo Voice Il modulo Voice (foto a lato) rivestirà un ruolo molto importante nell’interazione con I-Droid01, dal momento che realizzerà una sorta di ‘interfaccia sonora’. È basato su un microcontrollore specifico per applicazioni vocali (Sensory RSC-4128) e una memoria Flash esterna di 1 MB. Grazie ad esso, infatti, potranno essere forniti input sonori al robot sotto forma di comandi vocali, e il robot potrà restituire output sonori, attraverso frasi preimpostate. Inoltre, il modulo Voice sarà responsabile della registrazione e riproduzione di messaggi sonori, che potranno ‘arricchire’ l’espressività di I-D01. Il riconoscimento dei comandi si basa su un vocabolario di circa 40 termini (che permettono di costruire, combinati tra loro, più di 50 comandi), e non dipende da chi parla; al contrario, il modulo Voice realizza anche la ‘speaker verification’, grazie alla quale I-D01 si ‘bloccherà’ fino a quando non avrà riconosciuto la voce di chi ha impostato una password. Al fine di evitare danneggiamenti alla scheda, viene consigliato di inserirla, per il momento, in una busta antistatica, per proteggerla da eventuali scariche. E' ora possibile interagire verbalmente con I-Droid01; vedere ulteriori dettagli sul funzionamento del modulo Voice e dei comandi verbali accettati attualmente in: Voice e Test_F3_Voice. |
|
|
|
|