|
La fase di montaggio alla quale appartengono le istruzioni di questo fascicolo è quella che riguarda l’installazione della Motherboard e del modulo Voice. Essa, perciò, si concluderà con l’installazione della scheda elettronica Voice, che ti sarà fornita in uno dei prossimi fascicoli. Nel frattempo, però, già da adesso è possibile testare parte delle funzioni della scheda madre. In particolare, è possibile gestire, attraverso la tastiera a tre pulsanti e il display, un menu di funzioni che, tra l’altro, permettono di conoscere alcune importanti informazioni sullo stato interno del robot. Ponendo l’interruttore del marsupio in posizione ON, la Motherboard ‘prenderà vita’, alimentando il modulo Sound Follower, che comincerà la sua fase di inizializzazione (identica a quella che hai già testato al completamento della fase di montaggio precedente). La testa, quindi, andrà prima su e giù, per poi compiere un movimento sinistra/destra e porsi in posizione centrale. Ovviamente, se dovesse essere rilevato qualche errore, esso verrà segnalato come spiegato nel fascicolo 16. Visto che nelle istruzioni descritte in questo fascicolo è stato necessario intervenire sulla scheda Sound Follower, qualora ci fosse qualche problema nei movimenti della testa stacca il cavo di alimentazione dal marsupio e apri la testa stessa. Poi controlla lo stato dei cavi collegati al Sound Follower e l’integrità dei connettori; infine, verifica che la scheda sia ben alloggiata sui sostegni, che i cavi non intralcino i movimenti e poi riprova la sequenza di inizializzazione. Completata la fase preliminare, il robot rimarrà in attesa di stimoli sonori o tattili sulla sommità della testa. Inoltre, all’accensione del robot si attiverà anche il display, mostrando inizialmente un messaggio di ‘benvenuto’. Se le batterie sono scariche, sul display apparirà il messaggio «Alert - Logic Low» (nel caso in cui il livello di batterie per l’elettronica sia basso) o «Alert - Motors Low» (se a essere basso è il livello di carica delle batterie che alimentano i motori elettrici).
|
Anche se la fase di montaggio non è completa, è già possibile
|
||||||||||||
|
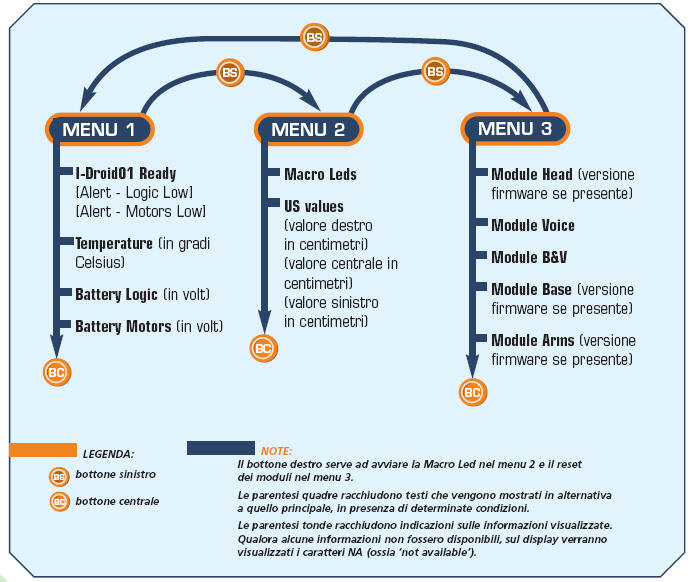
A questo punto del montaggio, nel primo menu sono disponibili le informazioni relative allo stato delle batterie. Nel secondo menu, invece, è possibile attivare un test sui LED che disattiva la rilevazione dei suoni, spegne i LED verdi degli occhi, accende e spegne i LED verdi, accende e spegne i LED rossi, accende e spegne i LED gialli, accende e spegne i LED delle orecchie. Per riattivare la rilevazione dei suoni si può utilizzare il terzo menu, che permette di conoscere quali moduli sono presenti (e, per alcuni moduli, la versione del firmware installato) ed eventualmente di resettarli, premendo il pulsante di selezione e conferma. Al momento, perciò, sarà possibile resettare il modulo Sound Follower, l’unico, per altro, a essere già installato e perciò l’unico che può venire rilevato dalla Motherboard. |
|||||||||||||