Qui sotto i link al sito
www.i-d01.deagostini.it
per scaricare i file pdf con le istruzioni di montaggio.
(Attenzione i file possono impiegare parecchio tempo per essere scaricati)

|
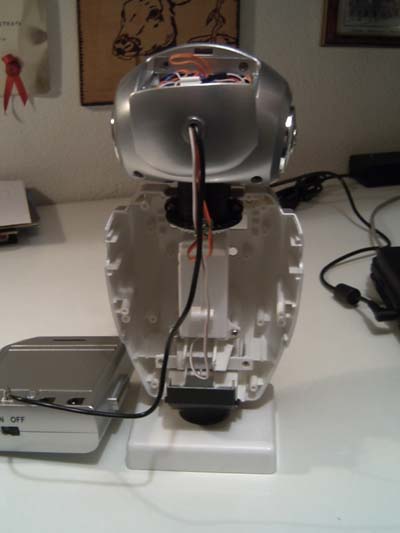
Questa fase di montaggio permette di installare il modulo Sound Follower nella testa e la scatola motore del collo. Con i pezzi dei
fascicolo 7, 8 e 9 è stata assemblata la scatola motore del collo. |
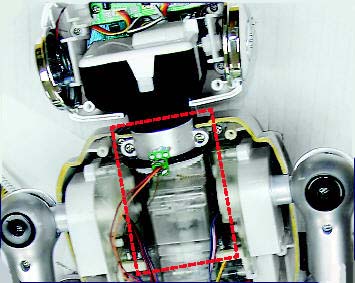 vista posizione scatola motore del collo |
 scatola motore del collo aperta |
| Un'immagine
curiosa: Eldo, il mio robot, sta aiutando nel montaggio del robot I-D01 trasportando la testa e sollevando il motore del collo. Eldo è il mio primo robot ed è una mia evoluzione del panettone DeA.
Visualizza il filmato:
|
|

|
Col fascicolo 10 si monta il collo ed il relativo encoder. Nessun test è possibile, al momento, su queste parti. Dopo il montaggio ho notato che l'encoder toccava il disco forato nero e la ruota dentata bianca. Ho risolto il problema inserendo un piccolo spessore sotto la schedina dell'encoder in modo da allontanarlo leggermente dalle ruote.
|
|
|
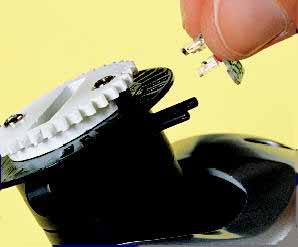 encoder del collo
encoder del collo
|
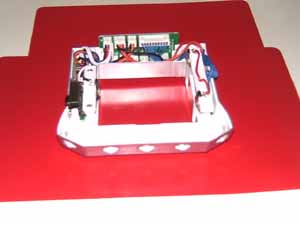
Con i fascicoli 11, 12, 13 e 14 viene completata la parte superiore del marsupio, che conterrà le 8 batterie. Nel marsupio trovano posto vari componenti:
Nel marsupio troveranno posto anche i sensori ad ultrasuoni, ma non sono stati ancora forniti. Nessuna difficoltà particolare per l'assemblaggio, ma va fatta una particolare attenzione alla disposizione dei vari cavetti che non devono intralciare la chiusura tra i due pezzi del marsupio. I componenti forniti all'interno del marsupio permettono di cominciare a capire qualcosa di questo ancora misterioso robot: 2 tensioni. Il pacco batterie conterrà 8 pile tipo AA da 1,5v. Il pacco batterie è suddiviso elettricamente in due gruppi di 5 e 3 batterie, che forniranno due tensioni: 7,5 e 4,5 vdc e, ovviamente, sono state predisposte due diverse prese per la ricarica delle batterie, una per ciascuna delle due tensioni. Vedere sotto lo schema di alimentazione del marsupio. Connettore power. Sul marsupio è presente un connettore che fornirà provvisoriamente la tensione per la testa del robot; in futuro credo che questo sarà utilizzato per portare le due tensioni alla breadbord. Non trovo alcun connettore per il collegamento delle tensioni verso l'interno del robot; il connettore adibito a questo collegamento trasferisce solo segnali, non le tensioni. |
|
|
|
|
||
Segnali. Il connettore di comunicazione tra marsupio e breadbord può contenere un massimo di 10 segnali; ipotizzo: 2 per il bus I2C, 6 per le porte in/out e 2 per ??
|
|
|


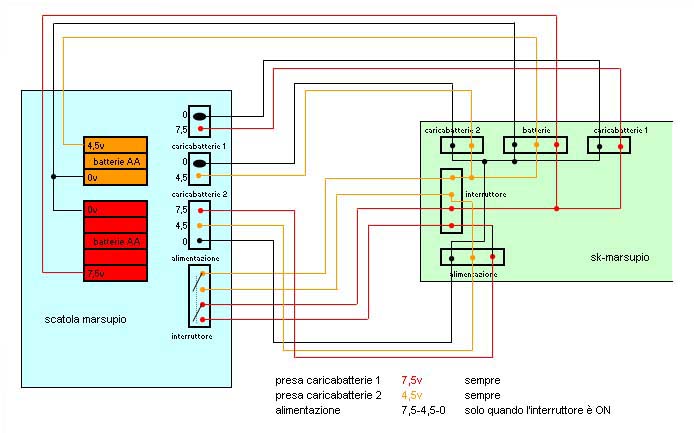
schema di alimentazione del marsupio
|
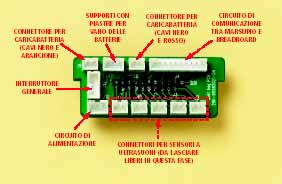
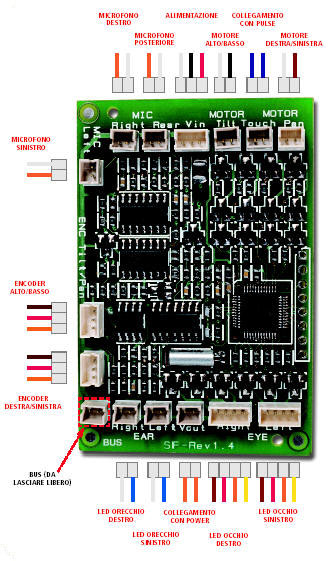
Col fascicolo 15, ecco finalmente il modulo: Head Controller - Sound Follower. Qui a lato le indicazioni necessarie per riconoscere i connettori presenti sulla scheda elettronica del Sound Follower. In tutto sono presenti 15 connettori, 14 dei quali verranno utilizzati in questa fase. L’unico connettore che rimarrà libero è quello mostrato in basso a sinistra, indicato sulla scheda dalla scritta BUS. Accanto a tutti gli altri connettori sono indicati i colori dei cavi da collegarvi: nell’effettuare il cablaggio fai sempre riferimento a questo schema. Partendo dall’alto a destra e proseguendo in senso antiorario, si trovano i connettori: motore di movimento destra/sinistra, cavo da connettore PULSE della scheda del sensore di sfioramento, motore di movimento alto/basso, alimentazione dal marsupio, microfono posteriore, microfono occhio destro, microfono occhio sinistro, encoder di movimento alto/basso, encoder di movimento destra/sinistra, bus (da lasciare libero), led orecchio destro, led orecchio sinistro, cavo da connettore POWER della scheda del sensore di sfioramento, led occhio destro, led occhio sinistro.
|
|
||||


Segnalazioni e correzioni inviate dagli
esperti:
|
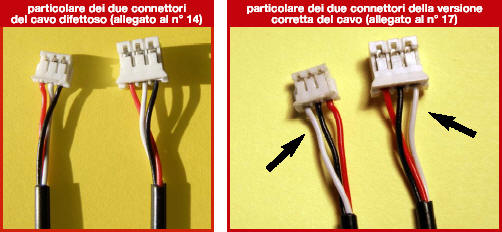
Cavo di alimentazione. Attenzione, è stato segnalato un difetto di fabbricazione nel cavo di alimentazione allegato al fascicolo n° 14, destinato ad alimentare il modulo sound follower (osservate le foto a destra). Confrontate la disposizione dei tre fili colorati che terminano nei due connettori di ciascun cavo illustrato: nel cavo corretto i due fili esterni, quello rosso e quello bianco, invertono la loro posizione nel passaggio tra i due connettori. Nel cavo difettoso invece i due fili esterni, quello rosso e quello nero, conservano la stessa posizione. |
|
|
|
Contatti pacco
batterie. I tre contatti del
pacco batterie possono non toccare correttamente le tre linguette poste
nel marsupio. Questa condizione può essere evidenziata dai seguenti sintomi: |
|
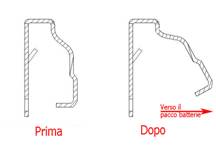
Puleggia nella scatola motore del collo. Nel caso si noti che il gearbox del collo abbia delle particolari difficoltà a muoversi, potrebbe essere dovuto ad una piccola imperfezione che si è presentata in alcuni ingranaggi, a destra una immagine esplicativa del problema con la relativa soluzione |
|
|
Sotto, un particolare di uno degli elementi mobili dell’albero, se sollecitato con una spinta inferta in uno dei sensi indicati dalla freccia dovrà ruotare più volte su se stesso.
Sotto, il dettaglio della procedura di pulizia, o di allargamento, della cavità del pezzo in questione. Utilizza un cacciavite a testa piatta e opera sempre con la dovuta attenzione e delicatezza.
|
Manutenzione del GEARBOX Le scatole dei motori (o gearbox) di I-D01 sono parti
meccaniche ‘complesse’ in cui il meccanismo di motoriduzione coinvolge
diversi alberi e ingranaggi, che devono poter ruotare fluidamente in
spazi molto ristretti . Nel caso ciò non avvenga i movimenti di
I-Droid01 possono risultare rumorosi, difficoltosi o addirittura
bloccati. Se ciò dovesse avvenire, esegui alcuni semplici controlli per
individuare l’origine del malfunzionamento. Per prima cosa verifica che
i vari ingranaggi non siano frenati dai coperchi dei gearbox, poi
controlla che i movimenti dei vari componenti mobili presenti sugli
alberi degli ingranaggi non siano frenati da residui plastici di
produzione, detriti o altro. Esamina, per esempio, uno degli alberi
forniti con il fascicolo 3, quello illustrato nella foto a sinistra,
dotato di due elementi fissi e di due elementi mobili. Fai ruotare ogni
sua parte mobile dando un colpo deciso con la punta di un dito: il
componente sollecitato dovrà poter effettuare più giri su se stesso e
risultare soggetto al minor attrito possibile.
|



|
|
|
|
|
|
|
|




Video
| Filmati in formato wmv |
|
F2_test_iniziale.wmv F2_movimenti_testa.wmv |