|
|
|
|
|
|
|
|
|
|
LowCoINS as free Inertial Navigation System (INS) The process of integrating the measurements form the experiment to obtain position and velocity is achieved developing and executing a complex algorithm offline after the flight. A classical levelled mechanizations process was used, so that all the measurements was projected into a reference frame NED (North-East-Down). The results of the LowCoINS experiment used as a pure inertial navigation system are briefly reported hereafter:
As you can see, just processing few minutes of data, the calculated position diverges immediately. This is due to the bias of the gyros resulting in wrong projection of the acceleration from the body frame to the navigation frame that lead to a wrong velocity determination and in turn a wrong position determination. Together with the bias of the gyros, also bias of the accelerometers and low sensitivity of the IMU contribute to the poor result. However this results were widely expected because inertial sensor for navigation need to be order of magnitudes better than those onboard LowCoINS. The alternative is to integrate the position and velocity determination from the IMU with that from a GPS receiver, using a sensor fusion algorithm i.e a Kalman Filter.
Kalman filtering is a statistical technique that combines knowledge of the statistical nature of system errors with knowledge of system dynamics, as represented as a state space model, to arrive at an estimate of the state of a system. The state estimate uses a weighting function, called the Kalman gain, which is optimized to produce a minimum error variance. For this reason, the Kalman filter is called an optimal filter. Integration of GPS and INS was made with a configuration known as loosely integrated or loosely coupled. This configuration typically includes a GPS receiver, which measurements are position and velocity form rather than pseudorange and pseudorange rate, an IMU, navigation equations to convert the gyros and accelerometer measurement from the IMU to platform attitude, position and velocity.
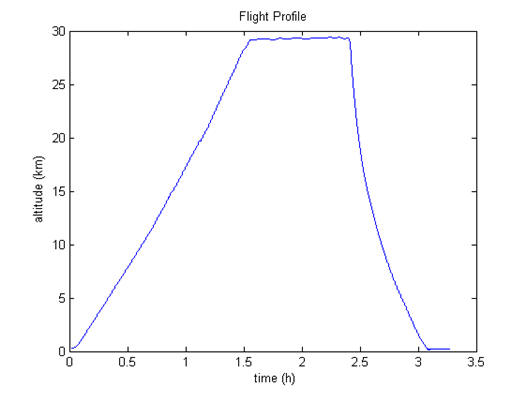
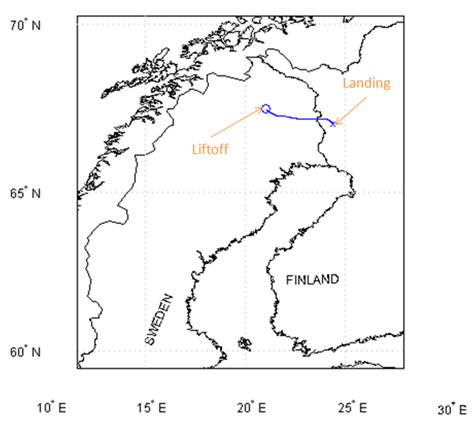
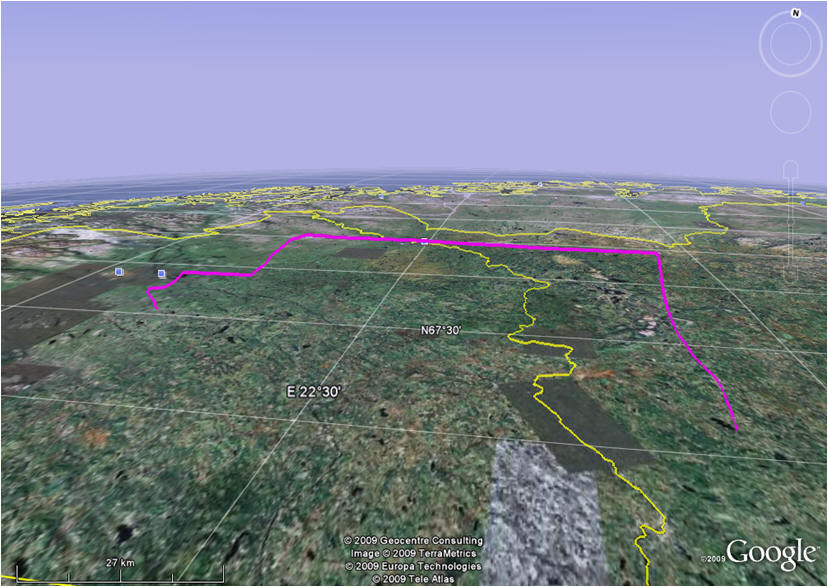
In this way it is possible to have a correction of the wrong position and velocity calculated by the IMU with a more precise GPS data, but in the meanwhile, having an estimate of the position and velocity of the Bexus 6 gondola in the time lapse between two GPS fixes, because of the higher rate of the IMU. The figure below show the flight profile obtained used LowCoINS filtered data.
LowCoINS as Attitude and Heading Reference System (AHRS) The quite poor performances of the experiment used as a navigator are exclusively due to the poor quality of the sensors that are not good enough for inertial navigation purposes. However, they could be good enough to realize a low accuracy Attitude and Heading Reference System (AHRS). The attitude of the gondola can be very useful for a wide range of balloon borne experiments, and it is an information that is not available from the Bexus standard avionics. The working principle of the LowCoINS used as AHRS is to integrate the angular velocity from the gyros to determine the attitude, while bounding the unavoidable drift of the attitude, mainly due to gyros biases, using the magnetometers and/or accelerometers as an auxiliary system for the attitude determination. The fusion of the attitude data computed from the integration of the gyros output and from the manipulation of the information from accelerometers and magnetometers is achieved using a sensor fusion algorithm such as a Kalman filter.
Hereafter are reported some flight phases. Below it is a graph showing the attitude of the gondola at lift-off. It can be noticed that the gondola is tilted about 15 deg about its pitch axis before returning in a levelled attitude at the moment of liftoff. This is due to the oscillation of the gondola as Hercules moves before the gondola is released. After the liftoff, the gondola begins to oscillate about its vertical axis. Note that the discontinuity in the yaw angle is due to the representation used for the yaw: the yaw in our assumption is between +/-180 deg, meaning that the solution jumps from 180 to -180 or vice-versa as the gondola points toward south. Zero degree for yaw means North, +90° means East, -90° means West.
During the ascent and float phase no major oscillation have been recorded. The gondola remained levelled with oscillation around its vertical axis.
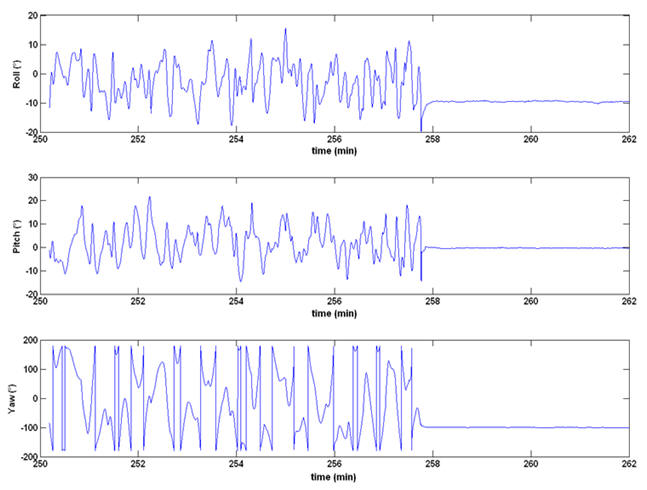
The attitude determination at the cut-down as well as at the landing, is uncertain and not reliable because of the large dynamic accelerations sensed by our sensors in these moments. It is noticeable a spike, particularly on the pitch and roll angles, corresponding to the time instants of the cut-down and the landing. Further tuning of the Kalman filter is required to have a better estimate of the attitude in these phases.
The following graph shows the attitude at the landing. Except for the spikes exactly at the touchdown, the attitude estimation is meaningful, and can be noticed that the gondola remains a little bit tilted after the landing, probably because of the terrain under the gondola.
|