Suspended Master Bicore
26.01.2003
Principle of operations
Il Bicore è una sequenza di due neuroni il cui ingresso è collegato all'uscita del precedente e formante un anello chiuso. Quando i neuroni sono quattro, allora viene chiamato Microcore, ma non è questo il nostro caso.
Il crcuito RC all'ingresso determina il tempo di propagazione del segnale di ingresso verso l'uscita. Il segnale di ingresso nel nostro caso, essendo il circuito un anello chiuso, è generato dallo spike generato all'atto della applicazione della tensione di alimentazione.
Questo spike che prevarrà sempre e solo da una parte, si propagherà continuamente da un neurone all'altro generando una oscillazione costante il cui valore in frequenza è determinato dai valori del circuito RC. L'oscillazione ovviamente avrà un duty-cycle diverso dal 50% a causa della tolleranza intrinseca dei componenti passivi. Per minimizzare ciò si eliminano le due resistenze verso massa dei circuiti RC e se ne mette una sola tra i due ingressi e si usano condensatori al di sotto del microfarad (solitamente in poliestere) che hanno una tolleranza tipica di +-5%.
Il motore, collegato tra le due uscite, si troverà ad essere alimentato con una tensione che cambia di polarità continuamente, generando in esso una rotazione ora in un senso, ora nell'altro. Questa oscillazione viene usata per alzare ed abbassare alternativamente le gambe ad essa collegate.
La mia soluzione
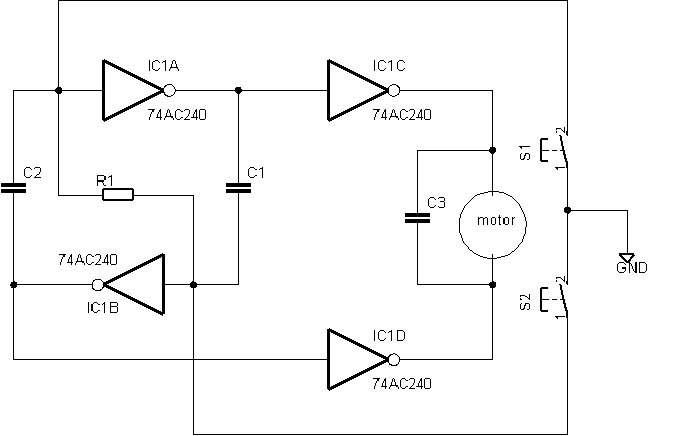
Qui sotto si può vedere lo schema di principio del bicore da me adottato. Ricordo che ho usato uno stampato della Solarbotics per semplicità e quindi lo schema elettrico non è fedele in quanto per pilotare i motori ci sono ben tre buffer-inverter in parallelo. Il bicore invece è fedele nella riproduzione.
I tre componenti passivi principali C1, C2, R1 sono la parte più critica del sistema ed adesso vedremo il perchè.
I valori classici sono 0.1uF o 0.22uF per i condensatori e 2.2Mohm o giù di lì per la resistenza.
In questo modo il bicore funziona PERFETTAMENTE dando una oscillazione precisa e della giusta velocità per pilotare i motori ma, solo se questo non è collegato.
Il motore in rotazione infatti genera un rumore elettrico notevole che si propaga per via elettrica attraverso i collegamenti, per via capacitiva attraverso la vicinanza tra i fili e per via elettromagnetica attraverso l'aria.
Questi disturbi fanno sì che l'oscillazione del bicore cambi nel duty-cycle così da avere una oscillazione asimmetrica in modo totalmente casuale. Potete immaginare quindi le due gambe del walker mentre si attorcigliano fra di loro facendolo inciampare e cadere per mai più rialzarsi.
Per ovviare a questo dovremo quindi agire su due vie: una elettrica tramite opportuni accorgimenti nella scelta dei componenti e l'altra eletromeccanica mettendo due sensori di fine corsa che agiscano sul bicore, correggendolo.
La prima via consiste nel mettere:
- Un condensatore elettrolitico da 22uF in parallelo sull'alimentazione del bicore insieme ad un'altro condensatore ceramico o poliestere da 0.1uF (se possibile è meglio ceramico) per cortocircuitare a massa (il negativo) il rumore presente sull'alimentazione.
La seconda via consiste nel preparare l'assieme meccanico come spiegato nel breve tutorial a pagina seguente e nell'assegnare ai componenti passivi del bicore dei valori diversi da quelli originari. Questi componenti infatti ne determinano la frequenza di oscillazione, ma indirettamente anche l'impedenza in ingresso che per i nostri scopi è troppo alta. Una impedenza molto alta infatti rende l'ingresso più sensibile ai piccoli segnali e, nel nostro caso, al rumore.
- Un condensatoreceramico da 0.1uF in parallelo al motore per cortocircuitare (sul motore stesso) gran parte del rumore da lui generato.
Ho perciò provato varie combinazioni come 2.2Mohm / 0.22uF , 220Kohm / 2.2uF , 22Kohm / 22uF che danno sempre la stessa costante di tempo.
Ho optato quindi per la combinazione 220Kohm / 2.2uF aggiustando però la resistenza a 330Kohm per aumentare la costante di tempo del bicore rendendo più ampia l'oscillazione delle gambe.
Cosa vedremo
Una volta data alimentazione al circuito vedremo oscillare le due gambe attaccate alla basetta LMP1. Le due gambe oscilleranno in modo leggermente asimmetrico (dovuto alla tolleranza piuttosto ampia dei condensatori elettrolitici, circa il 20% del valore nominale) che porterà una delle due ad alzarsi sempre di più a scapito dell'altra. A questo punto arriverà il momento che si chiuderà l'interruttore relativo alla gamba più alta ed il neurone relativo verrà resettato impedendo alla gamba di alzarsi oltre questo limite. Lo stesso fenomeno si potrà ripetere dallo stesso lato o da quello opposto, ma il neurone relativo verrà resettato riportando tutto nelle cndizioni ottimali.
M i g l i o r i e
Volendo rendere più semplice la regolazione della costante di tempo possiamo sostituire la resistenza da 330K con un trimmer da 470K in serie ad una resistenza da 120K e avere quindi un range molto ampio di regolazione.
Un'altra interessantissima modifica è quella di sostituire i due interruttori meccanici con due reed-relè magnetici così da non avere contatti che con il tempo tendono inevitabilmente ad ossidarsi ed a non funzionare più in modo corretto.