1
|
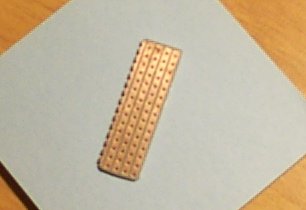
Basetta contatti: tagliare una
basetta preforata per una dimensione adeguata alle dimensioni del motore
usato. In questo caso la basetta ha le dimensioni di mm 40x10.
|
|
2
|
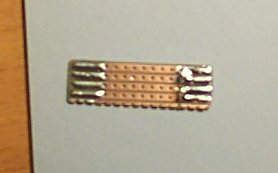
Stagnare i contatti ramati in
modo da avere una superfice bombata e quindi con maggiori probabilità
di fare contatto.
|
|
3
|
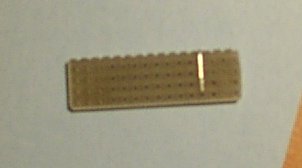
Unire le striscie stagnate con
un filo di rame (prelevato da una resistenza) posto trasversalmente. e
collegarvi un filo di rame isolato che andrà collegato alla massa
della batteria di alimentazione.
|
|
4
|
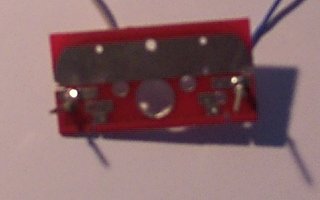
Prendere dalla basetta della Solarbotics
una basetta LMP1 ed eseguire dei tagli come disegnato nella foto per tagliare
il bordo ramato che ne cortocircuita i contatti stampati sopra.
|

|
5
|
Saldare nei fori indicati con
la freccia due pin abbastanza lunghi da toccare poi, durante la rotazione
del motore, la basetta descritta nei passi 1-3.
Collegare poi due fili, uno per ogni pin, nella parte posteriore della
basetta.
|
|
6
|
Particolare del montaggio.
- I pin vanno saldati nei fori
laterali.
- I fori per l'attacco tramite
viti autofilettanti vanno allargati con una punta di trapano fino alla
dimensione necessaria al passaggio delle viti.
- Il foro centrale serve pe
il passaggio della vite centrale che collega la ruota di plastica al perno
del motore.
|

|
7
|
Incollare sul dorso del motore
la basetta prestagnata usando della colla cianoacrilica a presa rapida
e lasciare asciugare per alcune decine di minuti.
|
|
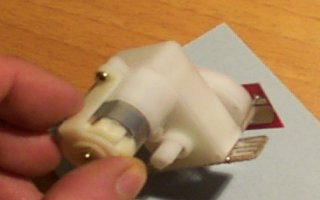
8
|
Montare la basetta-pin sulla ruota
del motore per mezzo di due viti autofilettanti da 1,5 o 2 mm circa.
Poi inserire ed avvitare la vite centrale che è quella che fissa
la ruota al perno motore.
|

|
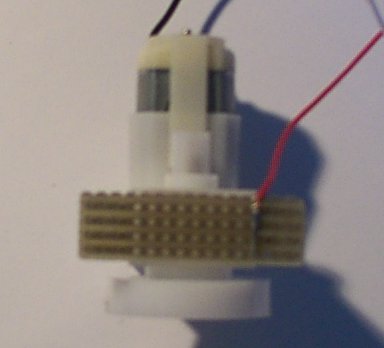
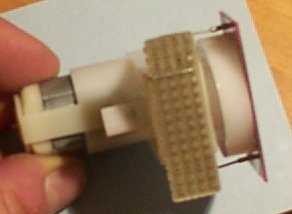
9
|
In questa foto è visibile
il montaggio completo del gruppo motore/sensori. Da questo gruppo usciranno
tre fili che andranno collegati uno a massa e gli altri due agli ingressi
del Suspended Bicore.
|
|
10
|
Ulteriore vista del montaggio completo.
|
|
11
|
L'assieme meccanico con le gambe applicate.
|
|
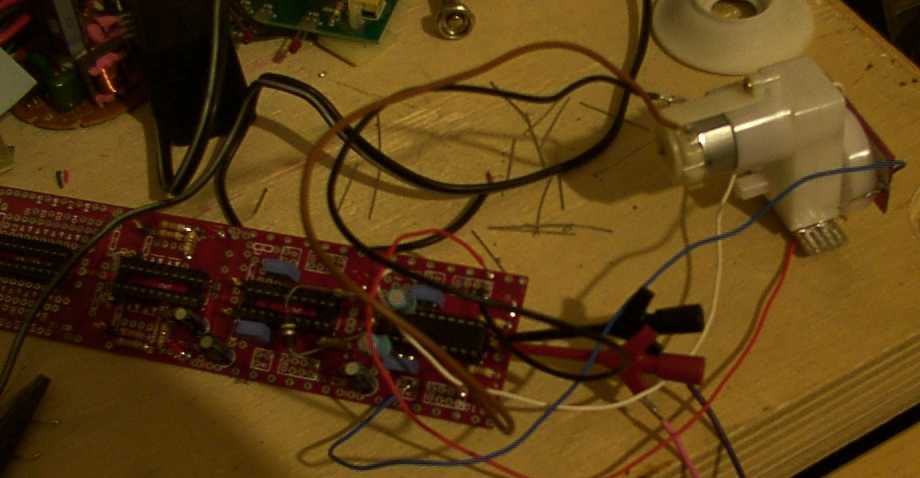
Questo è il prototipo sotto test sul mio banco di
lavoro.
|