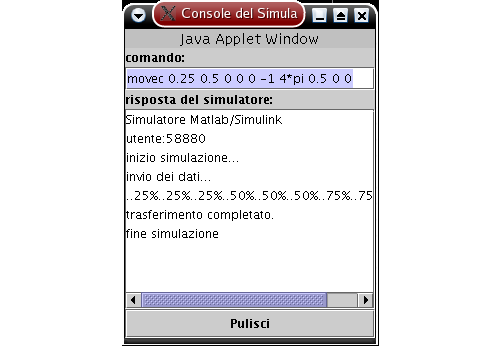
appare al caricamento dell'applet ed è la finestra che
consente di inviare i comandi al server remoto e di visualizzare i
messaggi del server stesso. I comandi possibili sono i seguenti:
Figure 5.6: Finestra della
console del simulatore
move, è il comando per far compiere traiettorie
rettilinee all'organo terminale, la sintassi è la seguente:
move ;
dove la terna , , , rappresenta la
posizione finale e la terna , , (angoli di RPY) rappresenta
l'orientamento finale. Il comando non prevede l'inserimento della
posizione e dell'orientamento iniziali in quanto questi sono ricavati
dalla configurazione corrente del manipolatore.
movec, è il comando per far compiere traiettorie
circolari all'organo terminale, la sintassi è la seguente:
movec arco ;
dove:
la terna , , , è la posizione del centro della circonferenza;
la terna , , , è la direzione dell'asse della circonferenza;
arco è la lunghezza dell'arco di circonferenza
in radianti;
la terna è l'orientamento
finale, terna di RPY.
La figura illustra qual è il percorso seguito dall'organo
terminale in base ai parametri inseriti.
plot, il comando fa aprire una nuova pagina del navigatore
Web dove sono rappresentati i grafici delle variabili cinematiche
calcolate con la simulazione: posizione e velocità dei giunti,
norma dell'errore di posizione e di orientamento della traiettoria e la
traiettoria desiderata dell'organo terminale.
Per una corretta interpretazione dei comandi move e movec
scriverne le parti separate esclusivamente da uno spazio.