


|
|
|
| RUBIK-ONE |
| Un Ringraziamento particolare ad Hans Andersson per aver realizzato il prototipo Tilted Twister |
| Download/Scarica | Caratteristiche tecniche |
|---|---|
 |
Pezzi: 345 Larghezza: cm. 14,50 Lunghezza: cm. 39,50 Altezza: cm. 34,50 Peso (senza batterie e senza cubo di Rubik): 848 gr. Peso (con 6 batterie 1,5V senza cubo di Rubik): 1010 gr. Peso (con 6 batterie 1,5V e con cubo di Rubik): 1120 gr. Kit: LEGO® NXT Serie: LEGO® MINDSTORMS Componenti elettrici: n.1 NXT, n.1 sensore di contatto, n.1 sensore di luce, n.1 sensore ad ultrasuoni, n.3 motori Tempo di scansione delle facce: circa 1 minuto Calcolo della soluzione: da 20 a 40 secondi Risoluzione del cubo: da 1 a 5 minuti Tempo totale: circa 6 minuti |
NEW
Visita la pagina di RUBIK-ONE su
Brickshelf Faccia VERDE (Upper) min.476 max.519
Faccia ROSSA (Back) min.544 max.571
Faccia BLU (Down) min.584 max.606
Faccia BIANCA (Left) min.648 max.662
Faccia ARANCIO (Front) min.671 max.688
Faccia GIALLA (Right) min.734 max.753

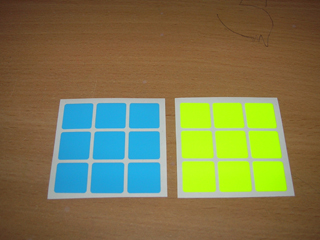
 ovviamente questi valori possono cambiare, a causa del colore delle facce e della luminosità presente nel locale, ma l'importante è che non si sovrappongano (maggiore è la differenza tra i colori e meglio è).
ovviamente questi valori possono cambiare, a causa del colore delle facce e della luminosità presente nel locale, ma l'importante è che non si sovrappongano (maggiore è la differenza tra i colori e meglio è).Durante il TEST è importante verificare che la luce generata dal sensore luminoso, sia centrata (+ o -) sugli adesivi (v.foto) RisolviCuboV1.1.nxc: serve per risolvere il cubo. Per prima cosa, vengono letti i colori delle 6 facce con questo ordine: LEFT - BACK - RIGHT - DOWN - FRONT - UPPER. Poi il programma elabora 3 soluzioni, utilizzando 3 algoritmi differenti. Trovata la soluzione migliore, inizia la risoluzione del cubo. Note importanti per il corretto funzionamento di Rubik-ONE:
| |
| DOWNLOAD / SCARICA | ||
|---|---|---|
| Qui sotto potete scaricare tutto il necessario per costruire
Rubik-ONE e per farlo funzionare. Se vi mancano dei programmi software visitate la sezione relativa ai LINK e troverete sicuramente quello che fa per voi. Buon Lavoro e Buon Divertimento |
||
 |
ISTRUZIONI DI MONTAGGIO 3D (LDD): Realizzate con il programma Lego Digital Designer
(NOTA: Il modello CAD riporta un'ingranaggio ad 8 denti per il movimento del cestello che deve essere sostituito da uno con 16 denti) |
 |
 |
SOFTWARE (file sorgente): Realizzato utilizzando il linguaggio di programmazione NXC. Questo è il link per scaricare il compilatore software Bricx Command Center. I software sono due (RisolviCuboV1.1.nxc e TestCuboV1.1.nxc). Il primo risolve il cubo di Rubik, mentre il secondo serve per verificare che le 6 facce del cubo di Rubik siano riconoscibili. Per poter sentire la voce di Rubik-ONE, è necessario caricare nell'NXT i file RSO che si trovano qui sotto. |
|
| VOCE (File RSO): Questi sono i file che devono essere caricati nell'NXT per poter sentire la voce. (Hello.rso - Thank You.rso - Woops.rso - Game Over.rso) |
|
|
| SOFTWARE (file compilato): Utilizzando il software NXT-G fornito con il KIT, è possibile scaricare i file (RisolviCuboV1.1.rxe e TestCuboV1.1.rxe) direttamente nell'NXT, senza utilizzare il compilatore Bricx Command Center. Per poter sentire la voce, è necessario caricare nell'NXT i file RSO che si trovano qui sopra. |
|
|
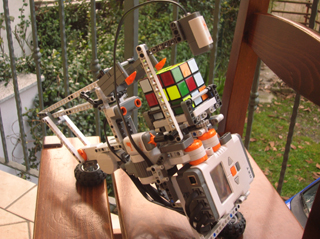 Rubik-ONE è un robot che risolve autonomamente (senza connessione al Personal Computer) il famosissimo Cubo di Rubik.
Rubik-ONE è un robot che risolve autonomamente (senza connessione al Personal Computer) il famosissimo Cubo di Rubik.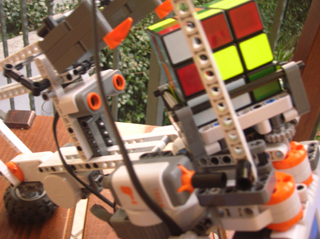 * n° 6 cavi (1 da 50mm, 4 da 35mm e 1 da 20 mm)
* n° 6 cavi (1 da 50mm, 4 da 35mm e 1 da 20 mm)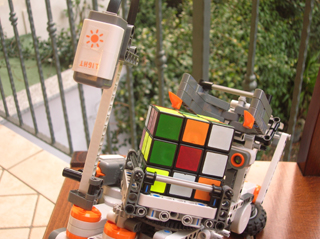 Il SENSORE DI CONTATTO, collegato all'ingresso IN1 dell'NXT, è utilizzato per posizionare correttamente il braccio luminoso.
Il SENSORE DI CONTATTO, collegato all'ingresso IN1 dell'NXT, è utilizzato per posizionare correttamente il braccio luminoso. colori particolari, per avere delle gradazioni di
colori particolari, per avere delle gradazioni di
 TestCuboV1.1.nxc: serve per verificare se le facce del cubo sono riconoscibili dal sensore di luce (riconoscimento delle tonalità di grigio).
TestCuboV1.1.nxc: serve per verificare se le facce del cubo sono riconoscibili dal sensore di luce (riconoscimento delle tonalità di grigio).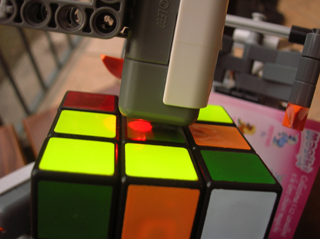
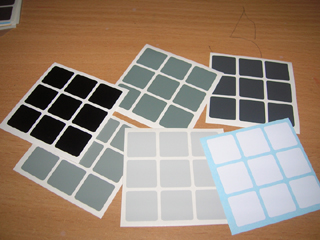 I dati letti dal sensore di luce sul nostro cubo sono i seguenti:
I dati letti dal sensore di luce sul nostro cubo sono i seguenti: